

Professor YAMAMOTO Shigeru
![]()
Faculty, Affiliation
Faculty of Transdisciplinary Sciences for Innovation, Institute of Transdisciplinary Sciences for Innovation
Head of School of Smart Technology and Innovation
College and School Educational Field
Graduate School of Frontier Science Initiative
Division of Frontier Engineering, Graduate School of Natural Science and Technology
Graduate School of Natural Science and Technology
Division of Electrical Engineering and Computer Science, Graduate School of Natural Science and Technology
School of Smart Technology and Innovation, College of Transdisciplinary Sciences for Innovation
Laboratory
Academic Background
【Academic background(Doctoral/Master's Degree)】
Osaka University Graduate School, Division of Engineering 198903 Completed
【Academic background(Bachelor's Degree)】
Osaka University 198703
【Degree】
Dr. Eng.
Career
Osaka University Faculty of Engineering Research Associate (1989/04/01-1994/03/31)
Osaka University Faculty of Engineering Science Research Associate (1994/04/01-1997/03/31)
Osaka University Graduate School of Engineering Science, Research Associate (1997/04/01-1998/06/30)
Osaka University Graduate School of Engineering Science Assistant Professor (1998/07/01-2000/03/31)
Osaka University Graduate School of Engineering Science Associate Professor (2000/04/01-2007/03/31)
Kanazawa University Graduate School of Natural Sci & Tech. Professor (2007/04/01-2008/03/31)
Kanazawa University Faculty of Electrical and Computer Engineering, Institute of Science and Engineering Professor (2008/04/01-2018/03/31)
Kanazawa University Faculty of Frontier Engineering, Institute of Science and Engineering Professor (2018/04/01-2022/07/31)
Kanazawa University Advisor to the President (2020/04/01-2022/03/31)
Kanazawa University Advisor to the President (2022/04/01-2024/03/31)
Kanazawa University Articulation Center for High School and University Director (2022/04/01-2024/03/31)
Kanazawa University Center for Mathematics, Data science and AI Smart Higher Education Director (2022/07/01-2024/03/31)
Kanazawa University Faculty of Transdisciplinary Sciences, Institute of Philosophy in Interdisciplinary Sciences Professor (2022/08/01-)
Kanazawa University Dean(2023/04/01-2028/03/31)
Year & Month of Birth
1964/05
Academic Society
IEEE
JSME
ISCIE
ISCIE
ISCIE
ISCIE
SICE
SICE
The Society of Instrument and Control Engineers
The Society of Instrument and Control Engineers
The Society of Instrument and Control Engineers
The Society of Instrument and Control Engineers
The Society of Instrument and Control Engineers
Award
The Society of Instrument and Control Engineers
○Fellow, The Society of Instrument and Control Engineers(2023/09/08)
Specialities
Control engineering/System engineering、Theory of informatics、Dynamics/Control、Intelligent mechanics/Mechanical systems
Speciality Keywords
Systems and Control Theory, Control Application, System Modeling, Real-Time Optimization
Research Themes
Data-Driven Model
Mathematical models that represent the relationships among input variables, internal variables, and output variables of a system or process are founded on underlying physical laws and are fitted to observed real data to determine the parameters of the mathematical model. The approach of data-driven models involves extracting only the necessary data from a large dataset to determine parameters in a way that aligns with the intended use of the model, or directly extracting the necessary data without going through a mathematical model.Currently, we are working on data-driven modeling for the initial settings of the hot finishing rolling process to improve the precision of steel products.
Data-Driven Predictive Control
The utilization of mathematical models enables the estimation of unobservable state variables and the prediction of future states; however, the accuracy of these estimations and predictions is contingent upon the quality of the mathematical model. Model Predictive Control (MPC) leverages mathematical models to forecast future system behavior and determine appropriate control inputs. Conversely, our research is focused on developing a model-free predictive control method that predicts system behavior and determines appropriate control inputs using accumulated data, without relying on mathematical models. This approach is gaining attention as an effective method for controlling complex phenomena where model construction is challenging.
Data-Driven Pole Placement Method
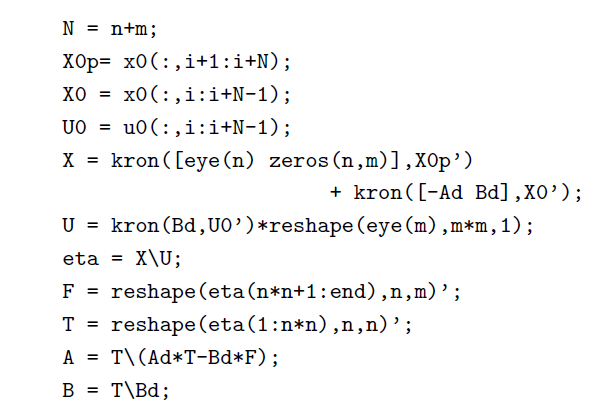 Pole placement is a standard method to obtain a feedback controller when we are given desired closed loop pole locations as a control performance specification. To apply the pole placement technique, we need a mathematical model of the controlled system. The purpose of this study is to derive a pole placement method which does not require any models of the controlled system but its input/output data.
Pole placement is a standard method to obtain a feedback controller when we are given desired closed loop pole locations as a control performance specification. To apply the pole placement technique, we need a mathematical model of the controlled system. The purpose of this study is to derive a pole placement method which does not require any models of the controlled system but its input/output data.
Real-time optimization via extremum seeking control
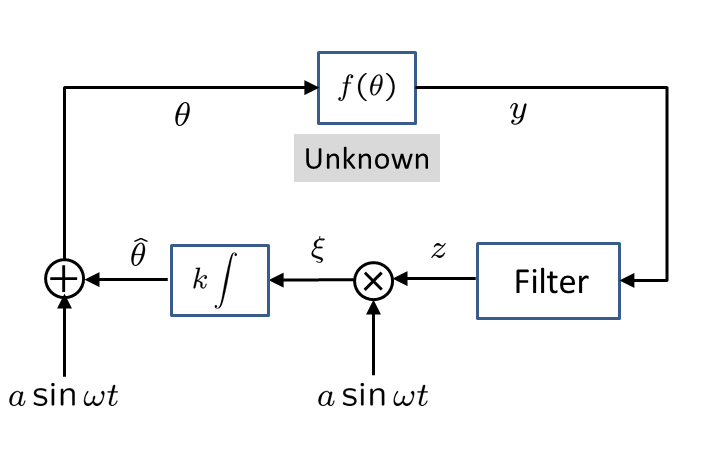 Extremum seeking control which is a sort of adaptive control enable us to find an optimal value of an uncertain cost function. In this study, we apply extremum seeking control to minimization of affect of nonlinearlity in control systems, maximization of power in electricity generation by renewable energy, and so on.
Extremum seeking control which is a sort of adaptive control enable us to find an optimal value of an uncertain cost function. In this study, we apply extremum seeking control to minimization of affect of nonlinearlity in control systems, maximization of power in electricity generation by renewable energy, and so on.
Books
- Tatsuo Arai, Shigeru Yamamoto, Kazuhisa Makino Systems and Human Science - For Safety, Security, and Dependability - : Selected Papers of the 1st International Symposium, SSR2003, Osaka, Japan, November 2003 Elsevier (Amsterdam, The Netherlands) 2005/02
Papers
- Model predictive control based on a detailed model and observer
for strip steering control in a hot strip finishing mill Shigeru YAMAMOTO, Shota MATSUDA, Eishin MORISHITA, Sanga TAKAGI, Tokujiro HORIKAWA, Yukihiro YAMASAKI, Hiroto UJIKAWA Transactions of the JSME 90 932 23-00051 2024/04/03

- A Two-Stage Method for Order Selection in Model-Free Predictive Control Pratvittaya Jiravit, Shigeru Yamamoto IEEJ Transactions on Electrical and Electronic Engineering 19 6 1035-1045 2024/02
- Improvement of a setup accuracy for hot strip finishing mills using clustering based on linear regression and local regression Shigeru Yamamoto, Kyosuke Tsukada, Syota Matsubara, Yukihiro Yamasaki, Sanga Takagi, Tokujiro Horikawa Transactions of the Institute of Systems, Control and Information Engineers 36 12 410-417 2023/12/15
- Twin Vibrational Power Generators and Extremum Seeking Control Shigeru Yamamoto, Haiming Wu, Takumi Kawaguchi, Toshiyuki Ueno IEEJ Transactions on Electrical and Electronic Engineering 18 6 953-959 2023/06
- Efficiency Improvement of Vibration Power Generation by Extremum Seeking Control against Vibration Randomness Takumi Kawaguchi, Shigeru yamamoto, Toshiyuki Ueno Transactions of the Society of Instrument and Control Engineers 59 1 19-25 2023/01/21
- On the state feedback stabilization of norm bounded uncertain systems Shigeru Yamamoto, Hidenori Kimura Proceedings of the 1990 American Control Conference 1 891-893 1990/05
- High-speed high-precision motion control based on quadratic stabilization Shigeru Yamamoto, Takao Nishida, Tadashi Kawabata, Hidenori Kmura Proceedings of the 1st Int. Conf. on Motion and Vibration Control 2 431-436 1992/09
- Quadratic stabilization tracking control and its application to a high speed positioning control system Shigeru Yamamoto, Takao Nishida, Hidenori Kimura Transactions of the Society of Instrument and Control Engineers 29 1 55-62 1993/01
- Quadratic stabilization for a class of uncertain systems and its application to a magnetic levitation system Shigeru Yamamoto, Qi Shen, Hidenori Kimura Transactions of the Society of Instrument and Control Engineers 29 3 334-339 1993/03
- Robust motion control based on quadratic stabilization and its application to two-inertia systems Shigeru Yamamoto, Takao Nishida, Tadashi Kawabata, Hidenori Kimura JSME International Journal Series C 37 3 559-564 1994/09
- Robustness analysis of symmetric systems based on the structured singular values Shigeru Yamamoto, Hidenori Kimura Proceedings of the 1st Asian Control Conference 1 359-362 1994/07
- On structured singular values of reciprocal matrices Shigeru Yamamoto, Hidenori Kimura Proceedings of the 1995 American Control Conference 5 3358-3359 1995/06
- On structured singular values of reciprocal matrices Shigeru Yamamoto, Hidenori Kimura Systems and Control Letters 26 3 163-166 1995/10
- Structured singular value of symmetric matrix and its lower bound Hiroshi Oku, Shigeru Yamamoto, Hidenori Kimura Transactions of the Society of Instrument and Control Engineers 31 11 1824-1827 1995/11
- Quadratic stabilization control via H-infinity controller and tuning up by time-varying gain Shigeru Yamamoto, Hidenori Kimura Transactions of the Society of Instrument and Control Engineers 32 4 486-494 1996/04
- Quadratic stabilization approach to coupled three-inertia benchmark problem Shigeru Yamamoto, Takahiro Ueda, Hidenori Kimura Transactions of the Society of Instrument and Control Engineers 32 7 1027-1034 1996/07
- Quadratic Stabilization by H-infinity Controller with Time-Varying Tuner Shigeru Yamamoto, Hidenori Kimura Preprints of the 13th World Congress IFAC D 189-194 1996/07
- The Complex mu Analysis for Reciprocal Systems Hiroshi Oku, Shigeru Yamamoto, Hidenori Kimura Proceedings of the 35th IEEE Conference on Decision and Control 1 1309-1314 1996/12
- Quadratic Stabilization by H-infinity State Feedback Controllers with Adjustable Parameters Shun Ushida, Shigeru Yamamoto, Hidenori Kimura Proceedings of the 35th IEEE Conference on Decision and Control 1 1003-1008 1996/12
- Quadratic Stabilization by H-infinity State Feedback Control with Adjustable Parameter Shigeru Yamamoto, Shun Ushida, Hidenori Kimura Transactions of the Institute of Systems, Control and Information Engineers 10 1 11-17 1997/01/15
- Model Set Validation and Update for Time-varying SISO Systems Ryozo Nagamune, Shigeru Yamamoto Proceedings of the 1998 American Control Conference 4 2361-2365 1998/06
- Identification and Validation/Update for Smallest Model Sets of Transfer Functions with Parametric Uncertainties Ryozo Nagamune, Shigeru Yamamoto, Hidenori Kimura Transactions of the Society of Instrument and Control Engineers 34 8 992-997 1998/08
- Robust Tuning Control of Multi-model Systems Shigeru Yamamoto, Koichi Yamauchi Proceedings of the 1997 American Control Conference 1 372-373 1997/06
- Delayed Feedback Control with Nonlinear Estimation in Chaotic Discrete-Time Systems Toshimitsu Ushio, Shigeru Yamamoto Physics Letters A 247 1-2 112-118 1998/10
- Identification of the Smallest Unfalsified Model Set with both Parametric and Unstructured Uncertainty Ryozo Nagamune, Shigeru Yamamoto, Hidenori Kimura Preprints of the 11th IFAC Symposium on System Identification 1 75-80 1997/07
- A Generalization of Delayed Feedback and Stability Analysis via LMI in Chaotic Discrete-Time Systems Toshimitsu Ushio, Shigeru Yamamoto The Transactions of the Institute of Electronics, Information and Communication Engineers. A J81-A 10 1339-1344 1998/10
- A Generalization of Delayed Feedback Control in Chaotic Discrete-Time Systems Toshimitsu Ushio, Shigeru Yamamoto Proceedings of the 37th IEEE Conference on Decision and Control 2 1946-1950 1998/12
- A Design Method of Discrete-time Quadratically Stabilizing State Feedback Controllers with Time-varying Parameters Shigeru Yamamoto, Takashi Motomura, Wanping Chen Transactions of the Institute of Systems, Control and Information Engineers 11 12 673-679 1998/12/15
- Identification of a State-space Model Set Taking Stabilizing State Feedback into Consideration Shigeru YAMAMOTO, Masataka KIMURA, Ryozo NAGAMUNE Transactions of the Society of Instrument and Control Engineers 35 2 213-220 1999/02
- Identification of a State-space Model Set Taking Stabilizing State Feedback into Consideration Ryozo Nagamune, Shigeru Yamamoto Transactions of the Society of Instrument and Control Engineers 35 6 741-747 1999/06/30
- A Design Method of Adaptive Control Systems by a Time-Varying Parameter of Robust Stabilizing State Feedback Shigeru Yamamoto, Koichi Yamauchi Transactions of the Institute of Systems, Control and Information Engineers 12 6 319-325 1999/06/15
- Identification of a State-space Model Set presuming the Existence of Robust Performance Control Masataka Kimura, Shigeru Yamamoto, Ryozo Nagamune Transactions of the Institute of Systems, Control and Information Engineers 12 7 444-446 1999/07/15
- Stability Analysis for Interconnected Hybrid Systems Shigeru Yamamoto, Toshimitsu Ushio Proceedings of the 37th Annual Allerton Conference 93-102 1999/09
- Prediction-based Control of Chaos Toshimitsu Ushio, Shigeru Yamamoto Physics Letters A 264 1 30-35 1999/12
- Prediction-Based Control in Chaotic Discrete-Time Systems Toshimitsu Ushio, Shigeru Yamamoto Proceedings of the 38th IEEE Conference on Decision and Control 2 2053-2054 1999/12
- Stabilization of unstable periodic orbits of chaotic discrete-time systems using prediction-based feedback control Toru Hino, Shigeru Yamamoto, Toshimitsu Ushio Proceedings of the 4th Asian Fuzzy Systems Symposium 1 347-352 2000/05
- A dynamic delayed feedback controller for chaotic discrete-time systems Shigeru Yamamoto, Toru Hino, Toshimitsu Ushio Proceedings of the 2000 American Control Conference 5 3358-3359 2000/06
- Control Jump Phenomena in a Flexible Rotor System Kaoru Inoue, Shigeru Yamamoto, Toshimitsu Ushio, Takashi Hikihara Transactions of the Institute of Systems, Control and Information Engineers 13 7 300-307 2000/07/15
- Elimination of jump phenomena in a flexible rotor system via torque control Kaoru Inoue, Shigeru Yamamoto, Toshimitsu Ushio, Takashi Hikihara Proceedings of the 2nd International Conference on Control of Oscillations and Chaos 1 58-61 2000/07
- Identification of a state-space model set presuming robust performance control Shigeru Yamamoto, Masataka Kimura, Ryozo Nagamune Proceedings of the 6th International Conference on Control, Automation, Robotics and Vision TA3 4-160 2000/12
- Dynamic Delayed Feedback Controllers for Chaotic Discrete-Time Systems Shigeru Yamamoto, Toru Hino, Toshimitsu Ushio IEEE Transactions on Circuits and Systems I 48 6 785-789 2001/06
- Torque Based Control of Whirling Motion under Mechanical Resonance Kaoru Inoue, Shigeru Yamamoto, Toshimitsu Ushio, Takashi Hikihara Proceedings of the 2001 IEEE Conference on Control Applications 206-211 2001/09
- Recursive delayed feedback control for chaotic discrete-time systems Shigeru Yamamoto, Toru Hino, Toshimitsu Ushio Proceedings of the 40th IEEE Conference on Decision and Control 3 2187-2192 2001/12
- Stabilization of unstable periodic orbits of chaotic discrete-time systems using prediction-based feedback control Toru Hino, Shigeru Yamamoto, Toshimitsu Ushio International Journal of Bifurcation and Chaos 12 2 439-446 2002/02/01
- Delayed Feedback Control with a Minimal-Order Observer for Stabilization of Chaotic Discrete-Time Systems Shigeru Yamamoto, Toru Hino, Toshimitsu Ushio International Journal of Bifurcation and Chaos 12 5 1047-1055 2002/05/01
- Stabilization of chaotic discrete-time systems by periodic delayed feedback control Shigeru Yamamoto, Toshimitsu Ushio Proceedings of the 2002 American Control Conference 3 2260-2261 2002/05
- Stability Analysis for a Class of Interconnected Hybrid Systems Shigeru Yamamoto, Toshimitsu Ushio IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences E85A 8 1921-1927 2002/08
- Computation of Limit Cycles in a Class of Hybrid Dynamical Systems with Certain Symmetric Properties Masakazu Adachi, Shigeru Yamamoto, Toshimitsu Ushio Proceedings of the NOLTA2002 623-626 2002/10
- Stabilization of Control Systems with a Periodic Communication Constraint by an Observer-based Controller Shigeru Yamamoto, Taiki Kawagoe, Toshimitsu Ushio Transactions of the Institute of Systems, Control and Information Engineers 15 11 593-599 2002/11/15
- Computation of limit cycles in piecewise affine systems with a symmetry Masakazu Adachi, Shigeru Yamamoto, Toshimitsu Ushio The Transactions of the Institute of Electronics, Information and Communication Engineers. A J86A 3 207-212 2003/03
- Application of Lyapunov Function Based Synthesis of Nonsmooth Limit Cycles to Motion Generation for Humanoid Robots Masakazu Adachi, Toshimitsu Ushio, Shigeru Yamamoto Proceedings of the 2nd International Symposium on Adaptive Motion of Animals and and Machines 2003/03
- Torque-Based Control of Whirling Motion in a Rotating Electric Machine under Mechanical Resonance Kaoru Inoue, Shigeru Yamamoto, Toshimitsu Ushio, and Takashi Hikihara IEEE Transactions on Control Systems Technology 11 3 335-344 2003/05/07
- Stabilization of Networked Control Systems with a Periodic Communication Constraint by a Periodic Output Feedback Kousuke Shinmyo, Shigeru Yamamoto, Toshimitsu Ushio Transactions of the Institute of Systems, Control and Information Engineers 16 8 429-431 2003/08/15
- Robust PID Rate-Based Control of Network Systems with Propagation Delay Variation Seiji Kubo, Toshimitsu Ushio, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 16 8 415-420 2003/08/15
- A Case Study in Human Error Modeling Based on a Hybrid Dynamical Systems Approach Kazunari Uchida, Shigeru Yamamoto Proceedings of the 1st International Symposium on Systems and Human Science 321-326 2003/11
- Rate Control in Communication Networks for Changes of the Number of Connections Satoshi Imai, Seiji Kubo, Shigeru Yamamoto, Toshimitsu Ushio Transactions of the Institute of Systems, Control and Information Engineers 17 1 10-16 2004/01/15
- Synthesis of Hybrid Systems with Limit Cycles Satisfying Piecewise Smooth Constraint Equations Masakazu Adachi, Toshimitsu Ushio, Shigeru Yamamoto IEICE Trans on Fundamentals of Electronics, Communications and Computer Sciences E87A 4 837-842 2004/04
- Asymptotic Stabilization and Synchronization of Parametric LCR Resonant Circuit using Characteristic of ts Coeffients Kaoru Inoue, Shigeru Yamamoto, Toshimitsu Ushio, Toshiji Kato IEEJ Transactions on Electronics, Information and Systems 124C 5 1141-1147 2004/05
- Database-driven Tuning of PID Controllers Jun Ota, Shigeru yamamoto Transactions of the Society of Instrument and Control Engineers 40 6 664-669 2004/06/30
- Performance Analysis for a Class of Distributed Control Systems with Network Communications Hideki Nishigaito, Shigeru Yamamoto Preprints of the 10th IFAC/IFORS/IMACS/IFIP Symposium on Large Scale Systems: Th 2 633-638 2004/07
- An Operation Support System based on Database-Driven On-Demand Predictive Control Daisuke Inoue, Shigeru Yamamoto Proceedings of the SICE Annual Conference 2004 2024-2027 2004/08
- Delayed Feedback Control for Vibration Suppression in Manual Control Systems Takashi Takimoto, Shigeru Yamamoto Proceedings of the SICE Annual Conference 2004 1498-1501 2004/08
- Fault Detection of an Operator Manipulating a Switching Control System Kazunari Uchida, Shigeru Yamamoto, Hiroshi Oku Proceedings of the SICE Annual Conference 2004 1558-1562 2004/08
- Robust Performance Design for Fair Bandwidth Allocations in Core-Stateless Networks Jinfeng Zhou, Satoshi Imai, Shigeru Yamamoto Transactions of the Society of Instrument and Control Engineers 40 9 978-980 2004/09/30
- Shrinkage Prediction of a Steel Production via Model-On-Demand Masatomo Kishi, Kazuyoshi Kimura, Jun Ota, Shigeru Yamamoto Proceedings of the 11th IFAC Symposium on automation in Mining, Mineral and Meta 2004/09
- Fault Detection of an Operator Manipulating a Switched Control System Kazunari Uchida, Shigeru Yamamoto, Hiroshi Oku Transactions of the Institute of Systems, Control and Information Engineers 18 1 22-27 2005/01/15
- Active compensation for oscillatory motions in human control behavior Takashi Takimoto, Shigeru Yamamoto Proceedings of the 2nd International Symposium on Systems and Human Science 2005/03
- Delayed Feedback Control Resolving Difficulty in Stabilization by Manual Control Takashi Takimoto, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 18 5 165-170 2005/05/15
- A Memory-Based Predictive Control Approach to a Braking Assist Problem Daisuke Inoue, Shigeru Yamamoto Proceedings of the SICE Annual Conference 2005 3186-3189 2005/08
- An active control method for oscillatory motions in human behavior Takashi Takimoto, Shigeru Yamamoto Proceedings of the SICE Annual Conference 2005 3195-3198 2005/08
- Invariant Sets of a Class of State-Reset Discrete-Time Systems and Networked Distributed Control Hideki Nishigaito, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 18 9 331-339 2005/09/15
- Control System Structures Based on Model-based Estimation Compensating Sampled Output Delays Tomoyuki Kozuka, Shigeru Yamamoto, Transactions of the Society of Instrument and Control Engineers 41 10 876-878 2005/10/31
- Improvement of Memory-Based Estimation by Distributed Neighborhood Selection Daisuke Inoue, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 18 10 368-372 2005/10/15
- Support for Driver via Just-In-Time Predictive Control and Fault Detection Based on a Nearest Neighbor Method during Braking to Stop Trains Transactions of the Japan Society of Mechanical Engineers. C 72 721 2756-2761 2006/09
- Direct Controller Tuning Based on Data Matching Shigeru Yamamoto and Kunihisa Okano Proceedings of the SICE-ICASE Joint Conference 2006 4028-4031 2006/10
- Reduced-order Washout Controllers Stabilizing Uncertain Equilibrium Points Takashi Takimoto and Shigeru Yamamoto Proceedings of the 2007 American Control Conference 5390-5393 2007/07
- Washout Control for Manual Operations Takashi Takimoto, Shigeru Yamamoto, Hiroshi Oku Proceedings of the European Control Conference 2007 1561-1566 2007/07
- Stabilization of Uncertain Equilibrium Points by Washout Control Takashi Takimoto, Shigeru Yamamoto Transactions of the Society of Instrument and Control Engineers 43 12 1120-1126 2007/12/31
- A Blocking Zero Placement Method by Dynamic State Feedback Takashi Takimoto, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 21 5 159-164 2008/05/15
- Lagrange Stability of Quantized State Feedback Control Systems via Binary-expansion Hideki Nishigaito, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 21 9 294-299 2008/09/15
- Washout Control for Manual Operations Takashi Takimoto, Shigeru Yamamoto, Hiroshi Oku IEEE Transactions on Control Systems Technology 16 6 1169 -1176 2008/11
- A Simple Tuning Method for a Class of Feedforward Controllers Utilizing PID Masataka Hamada and Shigeru Yamamoto Proceedings of ICCAS-SICE 2009 920-924 2009/08
- Network Interpretation of a Human-Machine Interaction System Hon Fai Lau and Shigeru Yamamoto Proceedings of the 7th Asian Control Conference 1491-1496 2009/08
- Robust Washout Control for Supporting Bicycle Riding Kotaro Shima, Shigeru Yamamoto, and Takashi Takimoto Proceedings of ICCAS-SICE 2009 241-245 2009/08
- Driver Centric Decentralized Controller Design in Traffic Flow Shigeru Yamamoto and Eiji Sakaguchi Proceedings of ICCAS-SICE 2009 246-250 2009/08
- Fictitious Reference Tuning for the Optimal Parameter of a Feedforward Controller in the Two-Degree-Of-Freedom Control System Osamu Kaneko, Yusuke Yamashina, Shigeru Yamamoto Proceedings of the 2010 IEEE International Conference on Control Applications 59-64 2010/09
- Bayesian Online Changepoint Detection to Improve Transparency in Human-Machine Interaction Systems Hon Fai Lau and Shigeru Yamamoto Proc. of the 49th IEEE Conference on Decision and Control 3572-3577 2010/12
- Fictitious Reference Tuning of the Feed-forward Controller in a Two-degree-of-Freedom Control System Osamu Kaneko, Yusuke Yamashina, and Shigeru Yamamoto 4 1 55-62 2011/01
- Simultaneous Attainment of the Optomal Parameter of a Controller and a Mathematical Model by an Application of the FRIT for the Smith Compensator Osamu Kaneko, Yusuke Wadagaki, Shigeru Yamamoto IEEJ Transactions on Electronics, Information and Systems 131 4 742-750 2011/04
- Distributed Connectivity Control in A Dynamic Network Zhong Ren and Shigeru Yamamoto Proc. of the 23rd Chinese Control and Decision Conference 2208-2213 2011/05
- Moment stability in mean square of stochastic delay differential equation Peng Xue, Shigeru Yamamoto, Yosuke Ikei Proc. of the 23rd Chinese Control and Decision Conference 2011/05
- Washout Control of a Cyclic Vehicular Traffic Flow Shigeru Yamamoto, Eiji Sakaguchi Preprints of the 18th World Congress of the International Federation of Automatic Control 8421-8426 2011/08
- Simultaneous Attainment of Model and Controller for Linear Time Delay Systems with the Data-Driven Smith Compensator Osamu Kaneko, Shigeru Yamamoto, Yusuke Wadagaki Preprints of the 18th World Congress of the International Federation of Automatic Control 7684-7689 2011/08
- Fictitious Reference Iterative Tuning for a System with a Time-Delay and/or Unstable Zeros in the Internal Model Control Architecture Osamu Kaneko, Yusuke Wadagaki, Hien Thi Nguyen, Shigeru Yamamoto Proc. 2011 IEEE International Conference on Control Applications 718-723 2011/09
- Fictitious Reference Iterative Tuning of Internal Model Controllers for Non-minimum Phase Plants Hien Thi Nguyen, Osamu Kaneko, Yusuke Wadagaki, Shigeru Yamamoto Proc. of SICE2011 2608-2613 2011/09
- Distributed Synchronization Algorithm for Multi-agent Systems Zhong Ren, Shigeru Yamamoto Proc. of SICE2011 1513-1516 2011/09
- Asymptotic mean square stability analysis for a stochastic delay differential equation Peng Xue, Shigeru Yamamoto Proc. of SICE2011 985-990 2011/09
- Convergence and Confidence Intervals of Sample Paths of a Stochastic Differential Equation Peng Xue, Shigeru Yamamoto Proc. of the 43rd ISCIE International Symposium on Stochastic Systems Theory and Its Applications 356-359 2011/10
- Data-Driven IMC for Non-Minimum Phase Systems - Laguerre Expansion Approach Hien Thi Nguyen, Osamu Kaneko, Shigeru Yamamoto Proc. the 50th IEEE Conference on Decision and Control and European Control Conference 476-481 2011/12
- Fictitious Reference Iterative Tuning for Non-Minimum Phase Systems in the IMC Architecture: Simultaneous Attainment of Controllers and Models u Kaneko, Hien Thi Nguyen, Yusuke Wadagaki, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration 5 2 101-108 2012/03
- FRIT based PID parameter tuning for linear time delay systems - Simultaneous attainment of models and controllers - Osamu Kaneko, Yusuke Wadagaki, Shigeru Yamamoto 2nd IFAC Conference on Advances in PID Control, 2012 WeA2.5 2012/03
- Asymptotic Mean Square Stability Analysis for a Stochastic Delay Differential Equation Peng Xue, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration 5 3 127-132 2012/05
- Control of a Cyclic Vehicular Traffic Flow Based on the Velocity Model -Experiments by Using LEGO NXT- Yasunobu Yokoi, Shigeru Yamamoto Proc. of SICE2012 801-806 2012/08
- Fictitious Reference Iterative Tuning of Non-Minimum Phase Systems in the Two-Degree-Of-Freedom Control Architecture: A Laguerre Expansion Approach- Shigeki Yoshitake, Osamu Kaneko, Shigeru Yamamoto Proc. of SICE2012 1190-1194 2012/08
- Data-Driven Parameter Optimization of Two-Degree-of-Freedom Controllers Approximated by Laguerre Expansions Osamu Kaneko, Shigeki Yoshitake, Shigeru Yamamoto The 15-th IFAC Workshop on Control Applications of Optimization 290-295 2012/09
- Data-driven parameter tuning of IMC for unstable plants Hien Thi Nguyen, Osamu Kaneko, Shigeru Yamamoto Proceedings of the 2012 Australian Control Conference 92-97 2012/11
- Just-In-Time Predictive Control for a Two-Wheeled Robot Nuttapun Nakpong, Shigeru Yamamoto Proc. The 10th International Conference on ICT and Knowledge Engineering 95-98 2012/11
- A PID tuning method based on matching between one-shot experimental data and filtered desired closed-loop responses Naoki Ikegami, Shigeru Yamamoto, Osamu Kaneko Proc. the 51st IEEE Conference on Decision and Control 3133-3138 2012/12
- Fictitious Reference Iterative Tuning of Internal Model Controllers for Non-Minimum Phase Systems: A Laguerre Expansion Approach Hien Thi Nguyen, Osamu Kaneko, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration 6 1 38-41 2013/01
- Data-driven Update of State Feedback Gains Osamu Kaneko, Fumiaki Sawakawa, Shigeru Yamamoto Transactions of the Society of Instrument and Control Engineers 49 6 632-638 2013/06
- Fictitious Reference Iterative Tuning of Disturbance Observers for Attenuation of the Effect of Periodic Unknown Exogenous Signals Fumiaki Uozumi, Osamu Kaneko, Shigeru Yamamoto Proceedings of the 11th IFAC Symposium on Adaptation and Learning in Control and Signal Processing 576-581 2013/07
- Fictitious Reference Iterative Tuning to Modified IMC for Unstable Plants Hien Thi Nguyen, Osamu Kaneko, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration, 6 5 345/352 2013/09
- FRIT of the Feedforward Part in the Two-Degree-of-Freedom Control Architecture for Time Delay Systems Osamu Kaneko, Shigeki Yoshitake, Shigeru Yamamoto Proc. of SICE2013 2013/09
- Analysis of Group Chase and Escape by Honeycomb Grid Cellular Automata Kota Yamamoto, Shigeru Yamamoto Proc. of SICE2013 2013/09
- Control of Multi-Agent Dynamic Systems Toward Stable Matching Mohd Syakirin Ramli, Shigeru Yamamoto Proccedings of MJIIT-JUC Joint International Symposium 2013 IT-025 2013/11
- Decentralized Control of Parallel-connected Inverters to Achieve Proportional Load Sharing with a Fast Response and Robustness Daisuke Ura, Shigeru Yamamoto IEEJ Transactions on Electronics, Information and Systems 134 1 63/68 2014/01
- FRIT for Non-Minimum Phase Systems in the 2DOF Control Architecture: Simultaneous Attainment of Controllers and Models Osamu Kaneko, Yusuke Wadagaki, Shigeki Yoshitake, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration 7 1 35/40 2014/01
- FRIT Based Simultaneous Update of Controller and Model for Integral Type Servo Systems with Full State Observers Osamu Kaneko, Tsuyoshi Miyajima, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 27 73 122/131 2014/03
- Fictitious Reference Iterative Tuning of Internal Model Controllers for Nonlinear Systems with Hysteresis Shogo Takada, Osamu Kaneko, Shigeru Yamamoto 549-552 2014/05
- Identification of Linear Time-Invariant Systems under Periodic Disturbance with its Estimation Osamu Kaneko, Kazuki Ohmura, Yuuki Hayashi, Shigeru Yamamoto IEEJ Transactions on Electronics, Information and Systems 134 7 917/923 2014/07
- A New Model-Free Predictive Control Method Using Input and Output Data Shigeru Yamamoto Advanced Materials Research 1042 182/187 2014/09
- Extremum Seeking for Dead-Zone Compensation and Its Application to a Two-Wheeled Robot Dessy Novita, Shigeru Yamamoto The 2nd International Conference on Control, Robotics and Cybernetics (ICCRC2014) 2014/08
- FRIT of ILQ Based Integral Type Servo Controllers and Its Applications Osamu Kaneko, Fumiaki Sawakawa, Shigeru Yamamoto Proc. of The 12th International Conference on Motion and Vibration Control (MOVIC 2014) 2014/08
- FRIT Based Recursive Update of Feedback Gains in the Integral Type Servo Systems Yuki Okano, Osamu Kaneko, Fumiaki Sawakawa, Shigeru Yamamoto Proc. of SICE2014 21/24 2014/09
- Derivation of a Cellular Automaton Model Based on a Binary Decision Diagram and Shannon's Expansion Kota Yamamoto, Shigeru Yamamoto Proc. of SICE2014 1581/1584 2014/09
- Data-driven controller tuning for attenuation of the effect of unknown periodic disturbance Fumiaki Uozumi, Osamu Kaneko, Shigeru Yamamoto, IEEJ Transactions on Electronics, Information and Systems 134 11 1696/1702 2014/11
- FRIT of the Smith Compensator for MIMO Time Delay Systems―The Case of Output Delays Akihiro Okuya, Osamu Kaneko, Shigeru Yamamoto Transactions of the Institute of Systems, Control and Information Engineers 28 2 58/65 2015/02
- A Lyapunov Function Approach to Dynamic Stable Matching in A Multi-agent System Mohd Syakirin Ramli, Shigeru Yamamoto ICGST Journal of Automatic Control and System Engineering 15 1 1/13 2015/06
- A Model-Free Predictive Control Method by l1-Minimization Shigeru Yamamoto Proc. of the 10th Asian Control Conference 2015 (ASCC 2015) 1570064495 2015/06
- Extremum Seeking for Dead-Zone Compensation and Its Application to a Two-Wheeled Robot Dessy Novita, Shigeru Yamamoto Journal of Automation and Control Engineering 3 4 265-269 2015/08
- Attenuation of Roll Eccentric Disturbance by Modified Repetitive Controllers for Steel Strip Process with Transport Time Delay Kazuki Omura, Hiroto Ujikawa, Osamu Kaneko, Yuki OKano, Shigeru Yamamoto, Hiroyuki Imanari, Tokujiro Horikawa Proc. of the 4th IFAC Workshop on Mining, Minerals and Metal Processing Th2A.1 2015/08
- Maximum energy output of a DFIG wind turbine using an improved MPPT-curve method Dhin Chung Phan, Shigeru Yamamoto Energies 8 10 11718/11736 2015/10
- FRIT Based Simultaneous Update of Controller and Model on State Predictive Servo Systems with Full State Observers for Linear Time-delay Systems Yuji Asano, Osamu Kaneko, Shigeru Yamamoto Transactions of the Society of Instrument and Control Engineers 51 11 769-778 2015/11
- Comparative Study of Model-Free Predictive Control and its Database Maintenance for Unstable Systems Herlambang Saputra, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration 8 6 390-395 2015/11
- A Model-Free Predictive Control Method based on Polynomial Regression Hongran Li, Shigeru Yamamoto SICE International Symposium on Control Systems 2016 2016/03
- A Data-driven Pole Placement Method Simultaneously Identifying a State-space Model Shigeru Yamamoto, Yuki Okano, Osamu Kaneko Transactions of the Institute of Systems, Control and Information Engineers 29 4 162-167 2016/04
- Identification of Linear Time-Invariant Systems under Periodic Disturbance with Its Estimation Osamu Kaneko, Kazuki Omura, Yuuki Hayashi, Shigeru Yamamoto Electronics and Communications in Japan 99 7 32-39 2016/06/14
- Polynomial Regression Based Model-Free Predictive Control for Nonlinear Systems Hongran Li, Shigeru Yamamoto Proc. of SICE 2016 578-582 2016/09/21
- Real-time simultaneously updating a linearized state-space model and pole placement gain Pyone Ei Ei Shwe, Shigeru Yamamoto Proc. of SICE 2016 196-201 2016/09/21
- An Identification Method for a Cellular Automaton Model Based on l1-Norm Optimization Kota Yamamoto, Shigeru Yamamoto Transactions of the Society of Instrument and Control Engineers 52 9 459-466 2016/09
- Rotor Speed Control of Doubly Fed Induction Generator Wind Turbines using Adaptive Maximum Power Point Tracking Dinh-Chung Phan, Shigeru Yamamoto Energy 111 377-388 2016/09
- An Application of Data-Driven Pole Placement: Simultaneously Deriving Linearized State-Space Model and Pole Placement Gain Pyone Ei Ei Shwe, Shigeru Yamamoto Proc. of The Seventh International Conference on Science and Engineering 2016 136-139 2016/12
- Model-Free Predictive Control Using Polynomial Regressors Hongran Li, Shigeru Yamamoto SICE Journal of Control, Measurement, and System Integration 10 2 93-99 2017/03
- An Improvement on Data-Driven Pole Placement for State Feedback Control and Model Identification Pyone Ei Ei Shwe, Shigeru Yamamoto Intelligent Control and Automation 8 3 139-153 2017/07
- A Data-Driven Pole Placement Approach to Design of Recursive Delayed Feedback Control Ryota Aramata, Shigeru Yamamoto Proc. of SICE 2017 1022-1025 2017/09
- Reducing the Computational Cost in L1-Norm Optimization for Cellular Automaton Model Identification Kota Yamamoto, Shigeru Yamamoto Proc. of SICE 2017 1018-1021 2017/09
- Rotational Synchronous Extremum Seeking Control for a Wind Energy System: Vibration Suppression Evaluation Via Small-Scale Experiments Yohei Kindaichi, Tatsuya Okubo, Shigeru Yamamoto Proc. of SICE 2017 1010-1013 2017/09
- A Data-Driven Tuning Method for Model Error Compensator Taro Sano, Shigeru Yamamoto Proc. of SICE 2018 1199-2002 2018/09
- Multi-Input Multi-Output Model-Free Predictive Control and Its Application to Wastewater Treatment Hongran Li, Shigeru Yamamoto IEEJ Transactions on Electrical and Electronic Engineering 112 5 753-758 2017/09
- Model-Free Predictive Control and Its Relation to Parameter Estimation Based Predictive Control Nicha Chaovalit, Shigeru Yamamoto Proc. of SICE International Symposium on Control Systems 2019 3I2-2 2019/03
- Efficiency Optimization for Permanent-Magnet Synchronous Machines using Model-Referenced Square-wave Extremum Seeking Control Guanqing Luo, Shigeru Yamamoto Proc. of Asian Control Conference 2019 543-548 2019/06/10
- Derivation of a Mathematical Model for Strip Walking in Hot Strip Finishing Mills K Higashi, S Yamamoto, S Takagi, T Horikawa, Y Yamasaki, H Ujikawa Proc. of SICE2020 1551-1555 2020/09/02
- Improvement of a Mathematical Model and Model Predictive Control for Strip Steering Control in Hot Strip Finishing Mill Shigeru YAMAMOTO, Kosei HIGASHI, Sanga TAKAGI, Tokujiro HORIKAWA, Yukihiro YAMASAKI, Hiroto UJIKAWA Transactions of the JSME 88 915 p. 22-00097, 14 2022/11/25
- A Singular Value Decomposition Approach in Model-Free Predictive Control Pratvittaya Jiravit, Shigeru Yamamoto Proc. of SICE International Symposium on Control Systems 2023 2M1-6 2024/03/19
Conference Presentations
Others
- Possibilities of Just-In-Time Methods as Data-Driven Control 133 3 604-609 2013/03/01

Arts and Fieldwork
Patent
○Plate thickness controller for rolling machine(publish date:2015/03/05)(No:特許2016-6028871)
○Plant control device(publish date:2016/05/19)
Theme to the desired joint research
○PID control
○Digital control, Real-time control
○Optimal control, Model predictive control
○High-speed and high-precision positioning control
○Vibration suppression
○MPPT(Maximum Power Point Tracking)
Grant-in-Aid for Scientific Research
○「双子型振動発電とその発電量向上・広帯域化のための適応制御機構の確立
」(2025-2027)
○「振動発電の発電量向上と広帯域化を担う革新的自己駆動型適応制御機構の開拓」(2021-2024)
○「長寿命バイオロギングを可能にする振動発電システムの最適設計と実時間最適化」(2017-2018)
○「ロバスト制御系の常時最適化と瞬時再設計による実用的適応制御」(2016-2019)
○「超離散反応拡散モデルを用いた自己駆動個体群の集団現象の解析と設計」(2014-2016)
○「モデル・制御・性能のトリプレット構造の解明によるJIT適応型内部モデル制御の構築」(2011-2014)
○「生体制御系におけるゆらぎの安定性と通信ネットワーク型分散制御システムへの応用」(2009-2011)
○「入出力空間における理想と現実のデータマッチングに基づいた制御系設計」(2005-2006)
○「データを分散共有するネットワーク型モデルオンデマンド」(2003-2004)
○「非線形システムの大域的な制御を目的としたマルチモデルの構築に関する基礎研究」(2001-2002)
○「観測データに基づくモデル集合の同定とロバスト制御系設計の同時実行に関する基礎研究」(1999-2000)
○「H∞制御のための最小モデル集合の同定とチュ-ニングコントロ-ラ」(1996-1996)
○「安心・安全社会構築のためのシステム人間科学の創成」(2001-2005)
○「モバイル通信機能をもつ複合離散事象システムのモデリングと分散スーパバイザ制御」(2000-2002)
○「リアルタイム制御の新展開-ハイブリッドダイナミカルシステム理論の体系化」(2000-2000)
○「複雑度にもとづくモデル集合の解析と時変制御に関する研究」(1999-2002)
○「高位レベルの制御のためのハイブリッドスーパバイザの設計と制御系検証システムの試作」(1997-1999)
○「モデル集合の同定と制御に関する研究」(1997-1998)
○「モデル集合のシステム理論と制御」(1995-1996)
Competitive research funding,Contribution
Collaborative research,Consignment study
○PID Control System Design(2009-2010)
Classes (Graduate Schools)
○Robust Control(2024)
○Mathematical Systems Control Theory(2024)
○Mathematical Systems Control Theory(2023)
○Advanced Practice(2022)
○Real-time System Control Theory(2021)
○Mathematical Systems Control Theory(2018)
○Mathematical Systems Control Theory(2017)
○Information-reinforced Mechatronics balanced with Environment A(2016)
○Information-reinforced Mechatronics balanced with Environment B(2016)
○Mathematical Theories for Information Sciences(2010)
Classes (Bachelors)
○Applied Information Science(2024)
○Smart Systems and Control(2024)
○Systems Optimization A(2024)
○Systems Optimization B(2024)
○Systems and Control C(2024)
○Systems and Control D(2024)
○Digital Control A(2024)
○Digital Control B(2024)
○Electrical Measurements and Control Laboratory(2022)
○Introduction to Cognitive Science(2016)