

西村 斉寛 (にしむら としひろ) 助教 NISHIMURA, Toshihiro
![]()
![]()
![]()
所属組織・役職等
理工研究域 フロンティア工学系
教育分野
【学士課程】
理工学域 フロンティア工学類
【大学院前期課程】
自然科学研究科 機械科学専攻
所属研究室等
人間・機械創造研究室 TEL:076-234-4683
学歴
【取得学位】
博士(工学)
職歴
金沢大学理工研究域フロンティア工学系 助教(2021/05-)
株式会社Cistron 取締役CTO(2026/04-)
イードル株式会社 外部顧問(技術アドバイザー)(2024/01/01-)
ファナック株式会社(-2021/04)
生年月
所属学会
IEEE Japan Joint Chapter, Treasurer(2023-2025)
日本ロボット学会
計測自動制御学会
日本機械学会
学内委員会委員等
○フロンティアプロジェクト運営委員 委員(2023-2023)
○フロンティアプロジェクト運営委員(2021-2021)
受賞学術賞
○IEEE IROS2022 Best Paper Award on Robot Mechanisms and Design Finalist(2022/10)
○ロボティクスシンポジア賞 最優秀賞(2023/03)
○第1回石川テックプラングランプリ リアルテックファンド賞(2023/12)
○研究奨励賞(2023/12)
○若手奨励賞(2023/12)
○ロボティクスシンポジア賞 優秀賞(2022/03)
○日本ロボット学会特別賞(2021/09)
○日本機械学会 若手優秀講演フェロー賞 (2018/06)
○計測自動制御学会SI部門賞 若手奨励賞 (2017/12)
○IEEE Robotics and Automation Society Japan Joint Chapter Young Award(2017/05)
○SI2021 優秀講演賞(2021/12)
○SI2017 優秀講演賞(2017/12)
○IEEE名古屋支部 国際会議研究発表賞 (2017/04)
○SI2016 優秀講演賞(2016/12)
○SI2022 優秀講演賞(1P3-H15)(2022/12)
○SI2022 優秀講演賞(3P2-B07)(2022/12)
○SI2022 優秀講演賞(1P2-E08)(2022/12)
○研究奨励賞(2022/12)
○若手研究者奨励賞(2023/01)
○SI2023 優秀講演賞(1A6-09)(2023/12)
○SI2023 優秀講演賞(1A6-02)(2023/12)
○第4回優秀講演賞(2023/09)
○第6回優秀講演賞(2025/09)
○Transactions on Mechatronics Best Paper Award 2025 Finalists(2025/07)
○第39回 研究奨励賞(2024/09)
○奨励賞(研究)(2025/05)
○第5回 優秀研究・技術賞(2024/09)
○第5回優秀講演賞(2024/09)
○SICE International Young Authors Award (SIYA-IROS2023)(2023/10)
○ROBOMECHベストプレゼンテーション表彰(2024/05)
○SI2024 優秀講演賞(2B3-08)(2025/12)
○SI2024 優秀講演賞(2B1-04)(2025/12)
○SI2024 優秀講演賞(3C5-02)(2024/12)
○SI2024 優秀講演賞(3A7-03)(2024/12)
○SI2024 優秀講演賞(2A5-07)(2024/12)
○SI2024 優秀講演賞(1G4-04)(2024/12)
○SI2024 優秀講演賞(1B1-12)(2024/12)
○SI2024 優秀講演賞(1B1-01)(2024/12)
専門分野
知能機械学・機械システム
専門分野キーワード
ロボティクス、ロボットハンド、マニピュレーション、ソフトロボット、機構設計
研究課題
先進的ロボットハンドの機構開発
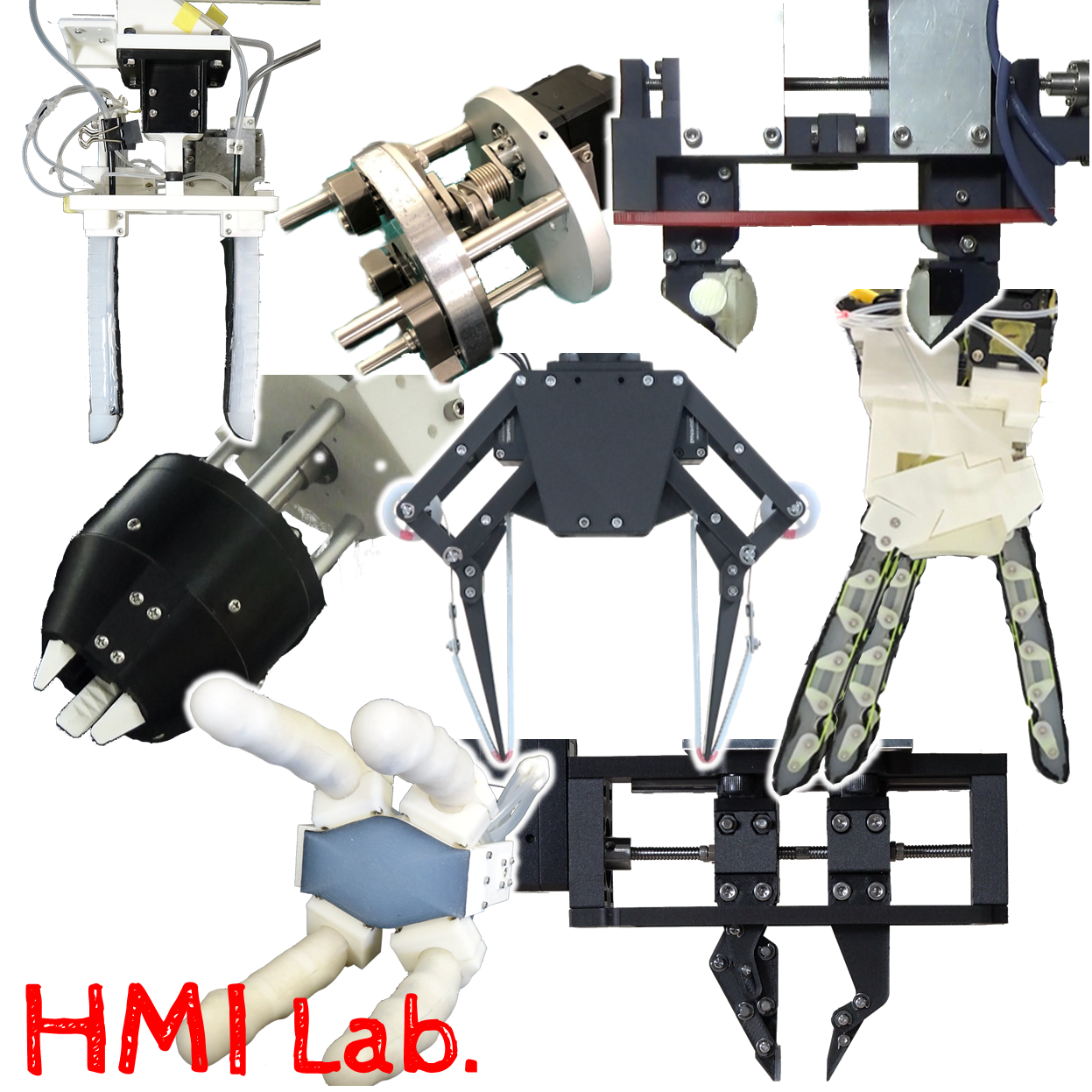 主に劣駆動機構を中心に,多様な機能を有するロボットハンドの機構開発を行う.
主に劣駆動機構を中心に,多様な機能を有するロボットハンドの機構開発を行う.
著書
論文
- 1-Degree-of-Freedom Robotic Gripper With Infinite Self-Twist Function IEEE Robotics and Automation Letters 7巻 3号 8447頁 2022/07 査読有 研究論文(学術雑誌)

- Grasping Strategy for Unknown Objects Based on Real-Time Grasp-Stability Evaluation Using Proximity Sensing IEEE Robotics and Automation Letters 7巻 4号 8643頁 2022/07 査読有 原著論文 研究論文(学術雑誌)
- Single-fingered reconfigurable robotic gripper with a folding mechanism for narrow working spaces IEEE Robotics and Automation Letters 7巻 4号 10192頁 2022/07 査読有 原著論文 研究論文(学術雑誌)
- Soft Robotic Hand With Finger-Bending/Friction-Reduction Switching Mechanism Through 1-Degree-of-Freedom Flow Control IEEE Robotics and Automation Letters 7巻 2号 5695頁 2022/04 査読有 原著論文 研究論文(学術雑誌)
- Development of assembly system with quick and low-cost installation Advanced Robotics 34巻 7-8号 1頁 2020/03/13 研究論文(学術雑誌)
- Fluid Pressure Monitoring-Based Strategy for Delicate Grasping of Fragile Objects by A Robotic Hand with Fluid Fingertips Sensors 19巻 4号 2019/02 査読有 研究論文(学術雑誌)
- Bent Sheet Grasping Stability for Sheet Manipulation Fujihira Yoshinori,Nishimura Toshihiro,Watanabe Tetsuyou IEEE Robotics and Automation Letters 1巻 1号 415頁 2016/01 査読有 研究論文(学術雑誌)
- Surface Texture of Deformable Robotic Fingertips for a Stable Grasp Under Both Dry and Wet Conditions IEEE Robotics and Automation Letters 2巻 4号 2048頁 2017/10 査読有 研究論文(学術雑誌)
- Peg-in-hole under state uncertainties via a passive wrist joint with push-activate-rotation function 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids) 67頁 2017/11 査読有 研究論文(プロシーディング)
- Variable-Grasping-Mode Underactuated Soft Gripper With Environmental Contact-Based Operation IEEE Robotics and Automation Letters 2巻 2号 1164頁 2017/04 査読有 研究論文(学術雑誌)
- Thin plate manipulation by an under-actuated robotic soft gripper utilizing the environment 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2017-September巻 1236頁 2017/09 査読有 研究論文(プロシーディング)
- Microgripper-Embedded Fluid Fingertip-Enhancing Positioning and Holding Abilities for Versatile Grasping Journal of Mechanisms and Robotics 9巻 6号 2017/12/01 査読有 研究論文(学術雑誌)
- Lightweight, High-Force Gripper Inspired by Chuck Clamping Devices IEEE Robotics and Automation Letters 3巻 3号 1354頁 2018/07 査読有 研究論文(学術雑誌)
- New condition for tofu stable grasping with fluid fingertips 2016 IEEE International Conference on Automation Science and Engineering (CASE) 2016/08 査読有 研究論文(プロシーディング)
- Lightweight High-Speed and High-Force Gripper for Assembly IEEE/ASME Transactions on Mechatronics 29巻 1号 16頁 2024/02 査読有 原著論文 研究論文(学術雑誌)
- High-Payload and Self-Adaptive Robotic Hand With 1-Degree-of-Freedom Translation/Rotation Switching Mechanism IEEE Robotics and Automation Letters 8巻 5号 2470頁 2023/05 査読有 原著論文 研究論文(学術雑誌)
- Integrating force and vision feedback for flexible assembly system Advanced Robotics 37巻 17号 1100頁 2023/08/24 査読有 原著論文 研究論文(学術雑誌)
- Fast and precise approximation of Minkowski sum of two rotational ellipsoids with a superellipsoid The Visual Computer 2024/06/17 査読有 原著論文 研究論文(学術雑誌)
- Local Curvature Estimation and Grasp Stability Prediction Based on Proximity Sensors on a Multi-Fingered Robot Hand Journal of Robotics and Mechatronics 35巻 5号 1340頁 2023/10/20 査読有 原著論文 研究論文(学術雑誌)
- Development of a Flexible Thin Wearable Device for Tuning Temperature, Humidity, and Surface Friction on Its Surface Applied Sciences 13巻 14号 8352頁 2023/07/19 査読有 原著論文 研究論文(学術雑誌)
- Cloth-Climbing Robot for Body Surface Inspection Without Clothing Removal Using Magnetic Gears 2025 IEEE/SICE International Symposium on System Integration, SII 2025 252頁 2025 査読有 原著論文 研究論文(プロシーディング)
- Flexible and slim device switching air blowing and suction by a single airflow control IEEE Robotics and Automation Letters 2023 査読有 原著論文 研究論文(学術雑誌)
- Optimizing Motion Parameters in Soft Robotic Hands Using Bayesian Optimization: Enhancing Cycle Time, Addressing Vibration, and Repeatability Toshihiro Nishimura,Tatsuki Isogai,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe IEEE Access 12巻 58196頁 2024/04 原著論文 研究論文(学術雑誌)
- Motion Prediction for Human-Robot Collaborative Tasks Using LSTM Proceedings of International Conference on Artificial Life and Robotics 449頁 2025 原著論文 研究論文(プロシーディング)
- Single-Motor-Driven (4 + 2)-Fingered Robotic Gripper Capable of Expanding the Workable Space in the Extremely Confined Environment Toshihiro Nishimura,Keisuke Akasaka,Subaru Ishikawa,Tetsuyou Watanabe IEEE Robotics and Automation Letters 9巻 12号 11585頁 2024/12 査読有 原著論文 研究論文(学術雑誌)
- Single-motor robotic gripper with multi-surface fingers for variable grasping configurations IEEE Robotics and Automation Letters 2024 査読有 原著論文 研究論文(学術雑誌)
- Flexible liquid-cooled electromagnetic gripper for grasping heavy objects IEEE Access 2025/07 査読有 原著論文 研究論文(学術雑誌)
- Robust and Error-Tolerant Peg-in-Hole Assembly Using Simple Control IEEE Robotics and Automation Letters 2025/07 査読有 原著論文 研究論文(学術雑誌)
- Lightweight and High-Payload Robotic Gripper Using Shape-Memory-Alloy Actuator and Self-Locking Mechanism Toshihiro Nishimura,Keisuke Akasaka,Kosei Ueno,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe IEEE Access 13巻 120056頁 2025/07 査読有 原著論文 研究論文(学術雑誌)
- Motor-Less Robotic Gripper: Driving Mechanism by Robotic Manipulator Movement Toshihiro Nishimura, Kosei Ueno, Tetsuyou Watanabe IEEE Access 13巻 23913 - 23923頁 2025/02/03 査読有 原著論文
- Single-Motor Robotic Gripper With Three Functional Modes for Grasping in Confined Spaces Toshihiro Nishimura,Tetsuyou Watanabe IEEE Robotics and Automation Letters 8巻 11号 7408 - 7415頁 2023/11/01 査読有 総説 研究論文(学術雑誌)
講演・口頭発表等
- 摩擦可変機能を有する1 自由度ソフトロボットハンドの開発(会議名:Robomech2022)(2022/06/02)
- 手首回転機構を有する1 自由度ロボットグリッパの開発(会議名:Robomech2022)(2022/06/02)
- 負荷感応型減速機構を用いた高速・高把持力グリッパの把持解析(会議名:SI2021)(2021/12/15)
- 負荷感応型減速機構を用いた高速・高把持力 グリッパの解析と評価 (会議名:第39回日本ロボット学会学術講演会)(2021/09/10)
- 柔らかさを活用した劣駆動ロボットハンドの開発 (会議名:金沢大学先端科学・イノベーション推進機構協力会 特別セミナー)(2021/12/15)
- Single-motor-driven (4 + 2)-fingered robotic gripper capable of expanding the workable space in the extremely confined environment(会議名:2025 IEEE International Conference on Robotics and Automation (ICRA))(2025/05/19)
- Single-Motor Robotic Gripper with Three Functional Modes for Grasping in Confined Spaces (会議名:2024 IEEE International Conference on Robotics and Automation (ICRA))(2024/05/13)
- Single-Motor Robotic Gripper with Multi-Surface Fingers for Variable Grasping Configurations (会議名:2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS))(2024/10/14)
- Cloth-Climbing Robot for Body Surface Inspection without Clothing Removal Using Magnetic Gears(会議名:2025 IEEE/SICE International Symposium on System Integration (SII))(2025/01/21)
- Versatile Robotic System for Assembly Tasks Using Flexible Mechanism (会議名:2025 IEEE/SICE International Symposium on System Integration (SII))(2025/01/21)
- Tight Clearance Peg-in-Hole Motion Planner Using Gripper with Flexible Joint and Differential Infinity Rotatable Function of Palm (会議名:2025 IEEE/SICE International Symposium on System Integration (SII))(2025/01/21)
- Whole Shape Estimation of Transparent Object from Its Contour using Statistical Shape Model(会議名:2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS))(2023/10/01)
- Development of A Gripper for Manipulation of Soft Line-Shaped Object(会議名:2024 IEEE/SICE International Symposium on System Integration (SII))(2024/01/08)
- Parameter Tuning Method to Improve Cycle Time of Soft Robotic Hand System Using Bayesian Optimization(会議名:2024 IEEE/SICE International Symposium on System Integration (SII))(2024/01/08)
- LCLE: A Liquid-Cooled Laminar Electromagnet for a Soft Robotic Gripper and Heavy Object Grasping(会議名:2023 IEEE 5th International Conference on BioInspired Processing (BIP))(2023/11/28)
- 1-Degree-Of-Freedom Robotic Gripper with Infinite Self-Twist Function(会議名:2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS))(2022/10/23)
- Soft Robotic Hand with Finger-Bending/friction-Reduction Switching Mechanism Via 1-Degree-Of-Freedom Flow Control(会議名:2022 IEEE 5th International Conference on Soft Robotics (RoboSoft))(2022/04)
- モータレスロボットグリッパの開発(会議名:第40回 日本ロボット学会学術講演会)(2022/09/05)
その他(報告書など)
芸術・フィールドワーク
特許
共同研究希望テーマ
科研費
○基盤研究(B)「機能統合型3Dプリンティングによるロボット製造技術の開発」(2025-2027) 代表者
○若手研究「少駆動源多自由度構造体を用いた多様な把持形態を有するソフトロボットハンド」(2022-2024) 代表者
○基盤研究(B)「界面洗浄・摩擦制御の実現による未知の表面特性をもつ物体の洗浄把持・操り」(2021-2023) 分担者
競争的資金・寄付金等
○競争的資金(学外) (2025-2026) 研究 3D印刷による力センシング機能内蔵柔軟指の開発と 農作物収穫ロボットハンドへの応用 研究開発助成事業 公益財団法人G-7奨学財団
○競争的資金(学外) (2025-2025) 研究 力センサを「一気に」印刷可能な3Dプリンタの事業化 大学発新産業創出基金事業可能性検証 JST
○競争的資金(学外) (2024-2024) 研究 指配置変更により多様な把持形態を実現する1モータロボットグリッパの開発 第16回北陸銀行若手研究者助成金 北陸銀行
○競争的資金(学外) (2024-2024) 研究 力センサを印刷可能な3Dプリンタによる次世代力センサの開発 産学融合先導モデル拠点創出プログラム 北陸RDX 経済産業省
○競争的資金(学外) (2024-2024) 研究 力センサを印刷可能な3Dプリンタのための研究 研究助成2024 公益財団法人永守財団
○競争的資金(学外) (2023-2024) 研究 力センサを「一気に」印刷する3Dプリンタの積層経路生成手法 大学発新産業創出基金事業可能性検証 JST
○競争的資金(学外) (2022-2023) 研究 力センサを印刷可能な 3D プリンタのための射出ヘッドの開発 研究助成2022 公益財団法人永守財団
○競争的資金(学内) (2022-2023) 研究 工作機械のワーク交換のためのモータレス・デュアルロボットハンドの創出 第8回若手研究者奨励賞 金沢大学産学連携協力会
○競争的資金(学外) (2022-2023) 研究 力センサを印刷可能な3Dプリンタのための光ファイバ式ひずみゲージ内包技術の開発 大学の新技術、研究活動への奨励金 澁谷学術文化スポーツ振興財団
○競争的資金(学外) (2022-2023) 研究 力センサを印刷可能な3Dプリンタのための光ファイバーセンサ射出ノズルの開発 科学技術研究助成 公益財団法人マツダ財団
○競争的資金(学外) (2022-2022) 研究 カセンサを「一気に」印刷可能な 3D プリンタの射出ノズル開発 2022年度助成金 公益財団法人 TAKEUCHI 育英奨学会
○競争的資金(学外) (2022-2022) 研究 多様な把持形態実現のための少駆動源多自由度ソフトロボットハンドの開発 科学技術研究助成<若手> 公益財団法人スズキ財団
共同研究・受託研究実績
A-STEP採択課題
学域・学類担当授業科目
○機械工学設計製図基礎(2023)
○アントレプレナーシップ論(2023)
○物理学実験(2023)
○フロンティアプロジェクトA(2022)
○フロンティアプロジェクトB(2022)
○機械工学設計製図基礎(BH)(2022)
○機械工学設計製図基礎(BH)(2022)
○物理学実験(2022)
○物理学実験(2022)
○バイオメカトロニクス基礎実験(2022)
○フロンティアプロジェクトA(2021)
○フロンティアプロジェクトB(2021)
○フロンティアプロジェクトB(2021)
大学院担当授業科目
○異分野研究探査Ⅰ(2024)
○異分野研究探査Ⅰ(2023)
他大学の客員教授
教育活動(FD)に関する研究
国際事業協力
留学生参加の社会活動
審議会等の参加
○IEEE Robotics and Automation Society Japan Joint Chapter, TreasurerIEEE RAS JJC役員(会計)(2024/01/01-2025/12/31)
○SICE Journal of Control, Measurement and System IntegrationAssociate Editor(2022/05/02-2025/02/28)
○システムインテグレーション部門講演会(SI2021)表彰副委員長(2021/09/01-2022/02/28)