
- Top Page
- Faculty List by Affiliation
- Profile

Professor WATANABE Tetsuyou
![]()
![]()
![]()
Faculty, Affiliation
Faculty of Frontier Engineering,Institute of Science and Engineering
College and School Educational Field
Division of Mechanical Science and Engineering, Graduate School of Natural Science and Technology
Division of Mechanical Science and Engineering, Graduate School of Natural Science and Technology
School of Frontier Engineering, College of Science and Engineering
Laboratory
Human Machine Inovation Laboratory
Academic Background
【Academic background(Doctoral/Master's Degree)】
Kyoto University Doctor Graduate School, Division of Engineering 200303 Completed
【Degree】
Doctor of Philosophy in Engineering
Career
Year & Month of Birth
Academic Society
THE JAPANESE SOCIETY FOR ARTIFICIAL INTELLIGENCE
The Japan Society of Mechanical Engineers
THE SOCIETY FOR NURSING SCIENCE AND ENGINEERING
JAPANESE SOCIETY FOR MEDICAL AND BIOLOGICAL ENGINEERING
The Robotics Society of Japan
THE SOCIETY OF INSTRUMENT AND CONTROL ENGINEERS
IEEE
IEEE Robotics and Automation Society
Award
○SI2022 Outstanding Presentation Award(2022/12)
○IEEE International Conference on Soft Robotics; Best Poster Award(2022/04)
○Research Encouragement Award(2022/12)
○SI2022 Outstanding Presentation Award(2022/12)
○Research Encouragement Award(2023/12)
○IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); Best Paper Award on Robot Mechanisms and Design Finalist(2022/10)
○Robotics Symposia Best Paper Award(2023/03)
○SI2022 Outstanding Presentation Award(2022/12)
○SI2022 Outstanding Presentation Award(2022/12)
○SI2022 Outstanding Presentation Award(2022/12)
○SI2022 Outstanding Presentation Award(2022/12)
○SI2022 Outstanding Presentation Award(2022/12)
○IROS 2019 Robotic Grasping and Manipulation Competition: Logistics Track 2nd place(2019/11/05)
○IROS 2019 Robotng andic Graspi Manipulation Competition: Manufacturing Track 3rd place(2019/11/05)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○MAGDA outstanding presentation/paper award(2005/03)
○Young Investigation Excellence Awards(2008/09/10)
Specialities
Intelligent robotics、Medical systems、、、Intelligent mechanics/Mechanical systems
Speciality Keywords
Robotics, Robotic hands, Manipulation, Human assist, Medical Engineering
Research Themes
Medical application of robot technology
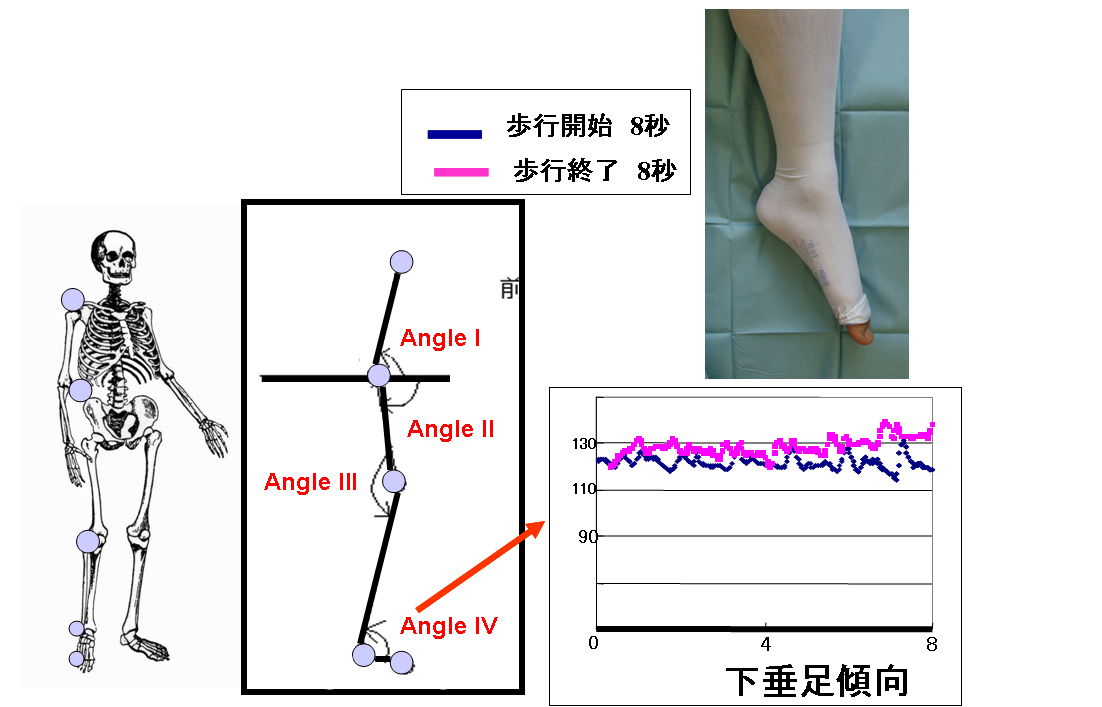 Images are a type of information that can be conveniently measured. By extracting human movement from these images and analyzing them, we are developing methods of disease estimation, object manipulation procedure detection, and emotion detection etc., which are capable of application in various fields such as medical welfare, engineering, and psychology.
Images are a type of information that can be conveniently measured. By extracting human movement from these images and analyzing them, we are developing methods of disease estimation, object manipulation procedure detection, and emotion detection etc., which are capable of application in various fields such as medical welfare, engineering, and psychology.
Adhesion Forces Reduction by Oscillation and Its Application to Micro Manipulation
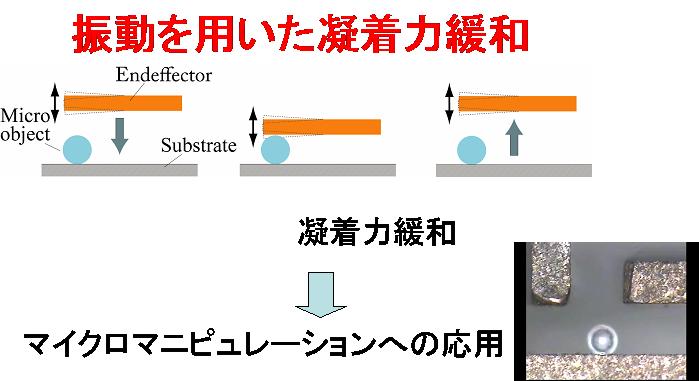 In the micro region, for scale effect, the force (attracting force) proportional to the area and length of van der Waals attraction, surface tension, and electrostatic force become dominant compared to the force proportional to the force of gravity and inertia. These attracting forces create an adhesion force between the target object and tool. To cope with this adhesion force, we are proposing a method of mitigating adhesion force through vibration. By minutely vibrating the end-effector and contacting it (bringing it near to) with the physical object on the table (foundation), the adhesion force between the end-effector and physical object will become small compared to the force between the table (foundation) and physical object. By applying this method, we can manipulate objects in the same way as manipulation of the micro region. Based on this method, we are developing methods of automatically conducting various macro manipulation.
In the micro region, for scale effect, the force (attracting force) proportional to the area and length of van der Waals attraction, surface tension, and electrostatic force become dominant compared to the force proportional to the force of gravity and inertia. These attracting forces create an adhesion force between the target object and tool. To cope with this adhesion force, we are proposing a method of mitigating adhesion force through vibration. By minutely vibrating the end-effector and contacting it (bringing it near to) with the physical object on the table (foundation), the adhesion force between the end-effector and physical object will become small compared to the force between the table (foundation) and physical object. By applying this method, we can manipulate objects in the same way as manipulation of the micro region. Based on this method, we are developing methods of automatically conducting various macro manipulation.
Object grasping and manipulation by robotic hand
Books
Papers
- Comparison of Effect of Soft Deformable Fingertip Stiffness on Resistible Force Focused on Change in Contact Area under Imposed Displacement Yuki Honma and Yoshinori Fujihira and Naohiko Hanajima and Masato Mizukami and Tetsuyou Watanabe 2021/02
- Abdominal Stiffness Evaluation in Massage for Constipation. Yunyi Wang,Chiaki Sakakibara,Miho Shogenji,Mikako Yoshida,Tetsuyou Watanabe Sensors (Basel, Switzerland) 21 4 2021/02/08
- Feature Assessment of Toe Area Activity during Walking of Elderly People with Stumbling Experiences Through Wearable Clog-Integrated Plantar Visualization System Yingjie Jin, Miho Shogenji, and Tetsuyou Watanabe Applied Sciences 10 4 1359 2020/02
- Specific aspects of operating an unfamiliar touchscreen for individuals with autism spectrum disorders Tetsuyou Watanabe, Hirokazu Kumazaki, Taro Muramatsu, Masaru Mimura Psychiatry and clinical neurosciences 74 2 157-158 2020/02
- Feasibility of autism-focused public speech training using a simple virtual audience for autism spectrum disorder. Hirokazu Kumazaki, Taro Muramatsu, Kazuki Kobayashi, Tetsuyou Watanabe, Kazunori Terada, Haruhiro Higashida, Teruko Yuhi, Masaru Mimura, Mitsuru Kikuchi Psychiatry and clinical neurosciences 74 2 124-131 2020/02
- Method for the Detection of Tumor Blood Vessels in Neurosurgery Using a Gripping Force Feedback System Hiroki Yokota, Takeshi Yoneyama, Tetsuyou Watanabe, Yasuo Sasagawa and Mitsutoshi Nakada Sensors 19 23 5157 2019/11
- Hierarchical Proximity Sensor for High-Speed and Intelligent Control of Robotic Hand Yuji Hirai, Takuya Mizukami, Yosuke Suzuki, Tokuo Tsuji, and Tetsuyou Watanabe Journal of Robotics and Mechatronics 31 3 453-463 2019/06
- Deformable Fingertip with a Friction Reduction System Based on Lubricating Effect for Smooth Operation under Both Dry and Wet Conditions Kaori Mizushima and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe Advanced Robotics 33 10 508-519 2019/04
- Wearable Trip-Risk Monitoring System Based on Plantar Information Yingjie Jin, Miho Shogenji, Tetsuyou Watanabe Proceedings of the IEEE/SICE International Symposium on System Integration (SII) 573-578 2020/01
- High-speed gripper with position-alignment functionality based on quick-return mechanism Masanari Tennomi, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Advances in Mechanism and Machine Science. IFToMM WC 2019. Mechanisms and Machine Science 2585-2597 2019/07
- Development of Contact Area Variable Surface for Manipulation Requiring Sliding Seita Nojiri, Kaori Mizushima, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft) 131-136 2019/04
- Development of disposable pressure sensible retractor system for preventing the overloading Proceedings of the IEEE/SICE International Symposium on System Integration (SII) 129-134 2019/01
- High-Speed and Intelligent Pre-Grasp Motion by a Robotic Hand Equipped with Hierarchical Proximity Sensors Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 7424-7431 2018/10
- Multi-Fingered Robotic Hand Based on Hybrid Mechanism of Tendon-Driven and Jamming Transition Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft) 376 - 381 2018/04
- Tough, Bendable and Stretchable Tactile Sensors Array for Covering Robot Surfaces Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft) 276-281 2018/04
- Adaptive Gripper with Soft Sheets for a Uniformly Distributed Grasping Force Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO) 373-378 2017/12
- Hierarchical Proximity Sensor for High-Speed and Intelligent Control of Robotic Hand Yuji Hirai and Takuya Mizukami and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe Journal of Robotics and Mechatronics 2019/03
- Bright spot analysis for photodynamic diagnosis of brain tumors using confocal microscopy Takeshi Yoneyama and Tetsuyo Watanabe and Sho Tamai and Katsuyoshi Miyashita, Mitsutoshi Nakada Photodiagnosis and Photodynamic Therapy 25 463-471 2019/03
- Fluid Pressure Monitoring-Based Strategy for Delicate Grasping of Fragile Objects by A Robotic Hand with Fluid Fingertips Toshihiro Nishimura, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Sensors 19 4 782 2019/02
- Lightweight, High-Force Gripper Inspired by Chuck Clamping Devices Toshihiro Nishimura, Masanari Tennomi, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe IEEE Robotics and Automation Letters 3 3 1354-1361 2018/07
- Finger-attachment device for the feedback of gripping and pulling force in a manipulating system for brain tumor resection Hiroyuki Chinbe, Takeshi Yoneyama, Tetsuyou Watanabe, Katsuyoshi Miyashita, Mitsutoshi Nakada International Journal of Computer Assisted Radiology and Surgery 13 1 3-12 2018/01
- Microgripper-embedded fluid fingertip-enhancing positioning and holding abilities for versatiale grasping Toshihiro Nishimura, Yoshinori Fujihira, and Tetsuyou Watanabe The ASME Journal of Mechanisms and Robotics 9 6 Paper No: JMR-16-1232 2017/10
- Survey of robotic manipulation studies intending practical applications in real environments -object recognition, soft robot hand, challenge program and benchmarking- 31 19-20 1114-1132 2017/09
- Surface Texture of Deformable Robotic Fingertips for a Stable Grasp under both Dry and Wet Conditions Kaori Mizushima, Toshihiro Nishimura, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe IEEE Robotics and Automation Letters 2 4 2048-2055 2017/06
- A Force-Visualized Silicone Retractor Attachable to Surgical Suction Pipes
Tetsuyou Watanabe, Toshio Koyama, Takeshi Yoneyama, and Mitsutoshi Nakada Sensors 17 4 773 2017/04

- Peg-in-Hole under State Uncertainties via a Passive Wrist Joint with Push-Activate-Rotation Function Toshihiro Nishimura, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Proceedings of the IEEE RAS International Conference on Humanoid Robots (Humanoids) 67-74 2017/11
- Thin plate manipulation by an under-actuated robotic soft gripper utilizing the environment Toshihiro Nishimura, Kaori Mizushima, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 1236-1243 2017/09
- Gear-Rack based Underactuated Robotic Hand Weifeng Wu, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Proceedings of the SICE Annual Conference 2017 1133-1135 2017/09
- Clog-Integrated Plantar Visualization System for Evaluating Activity During Walking Yingjie Jin, Miho Shogenji, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 862-867 2017/07
- Haptic threshold for pulling force feedback on surgeon's fingertip in medical robotic systems Hiroyuki Chinbe, Takeshi Yoneyama, Tetsuyou Watanabe, Nakada Mitsutoshi Proceedings of the Annual Conference of IEEE Industrial Electronics Society (IECON) 2016/10
- Wheelchair Control Based on a Polynomial Function Approximating a User's Gaze Curve Sawako Furuya, Alexander Alexopoulos, Essameddin Badreddin, Tetsuyou Watanabe Proceedings of the IEEE/SICE International Symposium on System Integration (SII) 2016/12
- Evaluation of walking balance based on pose difference between normal walk and walk under multi-task conditions, Journal of Robotics and Mechatronics Hiroyuki Maeda, Miho Shogenji, Tetsuyou Watanabe Journal of Robotics and Mechatronics 29 2 2017/04
- Fluorescence intensity and bright spot analyses using a confocal microscope for photodynamic diagnosis of brain tumors Takeshi Yoneyama, Tetsuyo Watanabe, Hiroyuki Kagawa, Yutaka Hayashi, Mitsutoshi Nakada Photodiagnosis and Photodynamic Therapy 17 13-21 2017/01
- Variable-grasping-mode underactuated soft gripper with environmental contact-based operation Toshihiro Nishimura, Kaori Mizushima, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe IEEE Robotics and Automation Letters 2 2 1164-1171 2017/01
- Force-Sensing Silicone Retractor for Attachment to Surgical Suction Pipes etsuyou Watanabe, Takanobu Iwai, Yoshinori Fujihira, Lina Wakako, Hiroyuki Kagawa and Takeshi Yoneyama Sensors 16 7 1133 2016/07
- Stiffness Measurement System Using Endoscopes with a Visualization Method Tetsuyou Watanabe, Toshio Koyama, Takeshi Yoneyama, and Mitsutoshi Nakada IEEE Sensors Journal 16 15 5889 - 5897 2016/05
- Bent Sheet Grasping Stability for Sheet Manipulation
Yoshinori Fujihira, Toshihiro Nishimura, and Tetsuyou Watanabe IEEE Robotics and Automation Letters 1 1 415-422 2016/01
- Gait Analysis Using Support Vector Machine as a Classification Method for Lumbar Spinal Canal Stenosis
"Hiroyuki Hayashi, Yasumitsu Toribatake, Hideki Murakami, Takeshi Yoneyama, Tetsuyou Watanabe, and Hiroyuki Tsuchiya " Orthopedics 38 11 e959-e964 2015/11
- Differences in gait characteristics of patients with lumbar spinal canal stenosis (L4 radiculopathy) and those with osteoarthritis of the hip
"Noriaki Yokogawa, Yasumitsu Toribatake, Hideki Murakami, Hiroyuki Hayashi, Takeshi Yoneyama, Tetsuyou Watanabe, and Hiroyuki Tsuchiya " PLOS ONE 10 4 e0124745 2015/04
- Stability Evaluation of Soft-finger Grasp Considering the Contact Surface 52 2 83-91 2015/02
- Delicate Food Grasping by Robotic Gripper with Viscoelastic Fluid-based Deformable Fingertips Tetsuyou Watanabe, Ryoji Maruyama, Masahiro Uchida Transaction on Control and Mechanical Systems 3 3 2014/09
- New Condition for Tofu Stable Grasping with Fluid Fingertips Toshihiro Nishimura, Yoshinori Fujihira, Ryota Adachi, Tetsuyou Watanabe Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (CASE) 2016
- Incompressible Liquid Based Force Sensible Silicone Retractor Attachable to Surgical Suction Instruments Toshio Koyama, Takeshi.Yoneyama, Mitsutoshi Nakada, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 1398-1404 2016
- Possibility of human detection through vision-based safety system Kobayashi, Takeshi and Watanabe, Tetsuyou Proceedings of The 6th International Conference on Advanced Mechatronics (ICAM2015) 2015
- Performance evaluation of the silicone retractor with force sensing function for surgical suction devices Koyama, Toshio and Iwai, Takanobu and Hayashi, Yutaka and Nakada, Mitsutoshi and Kagawa, Hiroyuki and Yoneyama, Takeshi and Watanabe, Tetsuyou Proceedings of The 6th International Conference on Advanced Mechatronics (ICAM2015) 2015
- Identification of Danger State for Grasping Delicate Tofu with Fingertips Containing Viscoelastic Fluid Ryota Adachi, Yoshinori Fujihira, and Tetsuyou Watanabe Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 497-503 2015
- Visualization Method Based Stiffness Sensing System for Endoscopes Takanobu Iwai, Toshio Koyama, Hiroyuki Kagawa, Takeshi Yoneyama, Tetsuyou Watanabe Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 6449-6452 2015
- The effect of behavioral preferences on skill acquisition in determining unspecified, suitable action patterns to control humanoid robots Taiki Takayama, Tetsuyou Watanabe Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 7586-7589 2015
- Silicone retractor with embedded force-sensing function for attachment to surgical suction pipes Toshio Koyama, Takanobu.Iwai, Takeshi.Yoneyama, Hiroyuki.Kagawa, Yutaka.Hayashi, Mitsutoshi Nakada, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 145-150 2015
- Experimental Investigation of Effect of Fingertip Stiffness on Resistible Force in Grasping Yoshinori Fujihira and Tetsuyou Watanabe Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 4334-4340 2015
- Design of Flexible Micro Manipulator for Neurosurgery Katsuyuki Tanaka, Takeshi Yoneyama, Tetsuyou Watanabe, Hiroyuki Kagawa, Yoshinori Fujihira, Takuya Hanyu, Yusuke Kanada, Yutaka Hayashi, Mitsutoshi Nakada Proceedings of International Conference on Precision Engineering (ICPE) 2014
- Three-axis force visualizing system for fiberscopes utilizing highly elastic fabric Takanobu Iwai, Yoshinori Fujihira, Lina Wakako, Hiroyuki Kagawa, Takeshi Yoneyama, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 1110-1115 2014
- Experimental investigation of effect of fingertip stiffness on friction while grasping an object etsuyou Watanabe, Yoshinori Fujihira Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 889-894 2014
- Identification of the causative disease of intermittent claudication through walking motion analysis: Feature analysis and differentiation
Watanabe T., Yoneyama T., Hayashi H., Toribatake Y. Scientific World Journal 2014 Article ID 861529 2014/07
- Force Sensor Attachable to Thin Fiberscopes/Endoscopes Utilizing High Elasticity Fabric Tetsuyou Watanabe, Takanobu Iwai, Yoshinori Fujihira, Lina Wakako, Hiroyuki Kagawa and Takeshi Yoneyama Sensors 14 3 5207-5220 2014/03
- Gripping Force Feedback System for Neurosurgery Yoshinori Fujihira, Takuya Hanyu, Yusuke Kanada, Takeshi Yoneyama, Tetsuyou Watanabe and Hiroyuki Kagawa International Journal of Automation Technology 8 1 83-94 2014/01
- Touchscreen User Motion Anticipation for Usability Improvement Tetsuyou Watanabe, Sawako Furuya Proceedings of the Seventh International Conference on Advances in Computer-Human Interactions (ACHI) 264-270 2014/03
- Design of a Desirable Trajectory and Convergent Control for 3-D.O.F Manipulator with a Nonholonomic Constraint Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2000 2684-2689 2000/04
- Dynamic Control of Soft-finger Hands for Pivoting an Object in Contact with the Environment Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2000 324-329 2000/11
- Dynamic Control of Multifingered Hands for Pivoting Operation Proceedings of the International Symposium on Robotics (ISR) 2001 1260-1265 2001/04
- Optimization of Power Grasps for Multiple Objects Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2001 1786-1791 2001/05
- Optimization of Grasping by Using a Required External Force Set Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2003 1127-1132 2003/09
- Optimization of Grasping an Object by Using Required Acceleration and Equilibrium-Force Sets Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 2003 338-343 2003/07
- Study on In-vivo Measuring Method of Solubility for Cerebral Thrombus Dissolution Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT) 2003 356-361 2003/12
- Development of Vital Signs Measuring Network System for Mental Stress Estimation Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT) 2003 345-350 2003/12
- Mechanics of Hybrid Active/Passive-Closure Grasps Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2004 1252-1257 2004/04
- Micromanipulation using squeeze effect Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2004 3357-3362 2004/09
- Object Manipulation under Hybrid Active/Passive Closure Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2005 1025-1032 2005/04
- Mechanism of Micro Manipulation using Oscillation Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2006 661-668 2006/05
- Study on Design of Micro-stirrer for Thrombus Dissolution Proceedings of the ASME/JSME Joint Conference on Micromechatronics for Information and Precision Equipment (MIPE) 2006 S22_01 2006/06
- Towards Whole Arm Manipulation by Contact State Transition Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2006 5682-5687 2006/10
- Joint Torque-velocity Pair Based Manipulability for manipulators Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT)(Proceedings of SPIE) 6794 679427-1-679427-7 2007/12
- Adhesion state detection by vision and its application to automatic micro manipulation Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2008 458-463 2008/09
- Joint Torque-velocity Pair Based Manipulability for Grasping System Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2008 2264-2270 2008/09
- Study on Adhesion Force Reduction and State Estimation by Piezo-transducer Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2009 2009/05
- Grasp Motion Planning for box opening task by multi-fingered hands and arms Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA2009) 2009 1-7 2009/12
- Development of a Multi-fingered Robot Hand with Softness-changeable Skin Mechanism Proceedings of the International Symposium on Robotics (ISR) 2010 606-612 2010/06
- Walking Motion Analysis of Intermittent Claudication and its Application to Medical Diagnosis Proceedings of the 2010 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2010 448-453 2010/09
- Manipulability Measures taking Necessary Joint Torques for Grasping into consideration Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2010 598-603 2010/10
- Force Detecting Gripper and Flexible Micro Manipulator for Neurosurgery Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2011 2011/08
- Key posture Extraction from Object Manipulations Experiments Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT) 2011 2011/08
- Softness Effects on Manipulability and Grasp Stability Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2011 1398-1404 2011/09
- Grasp input optimization taking contact position uncertainty into consideration Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO) 2011 2011/12
- Mechanism of tweezers grasping system Proceedings of 2011 IEEE/SICE International Symposium on System Integration (SII) 2011 744-749 2011/12
- Force detecting gripper and force feedback system for neurosurgery Proceedings of international congress and exhibition on computer assisted radiology and surgery (CARS) 2012 2012/06
- Study on differentiation factors for main disease identification of intermittent claudication Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2012 4696-4699 2013/08
- Discrimination of a Brain Tumor Region through MicroscaleEvaluation of Fluorescence Using Confocal Microscopy Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2013 2013/06
- Force feedback manipulating system for neurosurgery Procedia CIRP 2013 6409-6412 2013/06
- Main disease classification of intermittent claudication via L1-regularized SVM Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2013 6409-6412 2013/06
- Evaluation of differences in the gait characteristics of patients with lumbar spinal canal stenosis (L4 radiculopathy) and osteoarthritis of the hip by using a new motion analysis method Proceedings of EuroSpine 2012 2012/01
- Effect of visual cues on line drawing performance Proceedings of IEEE International Conference on System, Man and Cybernetics (SMC) 2013/10
- Force-detecting gripper and force feedback system for neurosurgery applications Takeshi Yoneyama, Tetsuyou Watanabe, Hiroyuki Kagawa, Junichiro Hamada, Yutaka Hayashi, Mitsutoshi Nakada International Journal for Computer Assisted Radiology and Surgery 2013/01
- 非圧縮性流体指からなるロボットハンドによる壊れやすい対象物の把持 内田真裕,渡辺哲陽,丸山量志 2013/09
- 脳腫瘍摘出手術のための力検出多自由度微細マニピュレータの開発 50 4 329-339 2012/08
- Grasp input optimization taking contact position and object information uncertainties into consideration Papat Fungtammasan and Tetsuyou Watanabe IEEE Transactions on robotics 28 5 1170-1177 2012/06
- Adhesion Forces Reduction by Oscillation and Its Application to Micro Manipulation Tetsuyou Watanabe and ZhongWei Jiang Cutting Edge Robotics 2009 199-214 2010/09
- Task Based Hybrid Closure Grasping Optimization for Autonomous Robot Hand Design and Control of Intelligent Robotic Systems 425-451 2009/02
- New Method of Motion Analysis to Clarify Differentiation between Lumbar Spinal Canal Stenosis and Osteoarthritis of the Hip Joint Yasumitsu Toribatake, Noriaki Yokogawa, Hiroyuki Hayashi, Takeshi Yoneyama, Tetsuyou Watanabe, Yui Sano Jounral of Spine Research 2 2 220-222 2011/02
- Effect of Torque-Velocity Relationship on Manipulability for Robot Manipulators The ASME Journal of Mechanisms and Robotics 3 4 2011/09
- Design of a Desirable Trajectory and Convergent Control for 3 - D.O.F Manipulator with a Nonholonomic Constraint Journal of the Robotics Society of Japan 18 4 584-589 2000/05
- Optimization of Power Grasps for Multiple Objects Transactions of the Japan Society of Mechanical Engineers. C 68 668 1223-1230 2002/04
- Optimization of Grasping by Using a Required External Force Set Journal of the Robotics Society of Japan 21 3 97-102 2003/04
- Optimization of Grasping an Object by Using Required Acceleration and Equilibrium-Force Sets Journal of the Robotics Society of Japan 22 3 370-376 2004/04
- Mechanics of Hybrid Active/Passive-Closure Grasps Journal of the Robotics Society of Japan 24 1 131-139 2006/01
- On the Design of a Tactile Sensor Segment for Braille Pattern Recognition : Sensor Structure and Design Parameters Journal of the Japan Society of Applied Electromagnetics 14 3 333-338 2006/09
- Object Manipulation under Hybrid Active/Passive Closure Journal of the Robotics Society of Japan 25 4 643-650 2007/04
- Adhesion Forces Relaxation by Oscillation and Its Application to Micro Manipulation(Mechanical Systems) Transactions of the Japan Society of Mechanical Engineers. C 74 737 23-30 2008/01
- Study on Development About Micro-Stirrer for Cerebral Thrombus Dissolution Which Has Sensor Ability(Mechanical Systems) Transactions of the Japan Society of Mechanical Engineers. C 74 743 1798-1803 2008/07
- Adhesion State Detection by Vision and Its Application to Automatic Micro Manipulation(Mechanical Systems) Transactions of the Japan Society of Mechanical Engineers. C 74 747 2755-2762 2008/11
- Joint Torque-Velocity Pair Based Manipulability for Manipulators(Mechanical Systems) WATANABE Tetsuyou Transactions of the Japan Society of Mechanical Engineers. C 74 748 3012-3018 2008/12
- Joint Torque-velocity Pair Based Manipulability for Grasping System WATANABE Tetsuyou Journal of the Robotics Society of Japan 27 3 358-367 2009/04
- Study on Estimation and Relaxation of Adhesion State by Piezo-Transducer(Mechanical Systems) Transactions of the Japan Society of Mechanical Engineers. C 75 752 964-969 2009/04
- Gait Characteristics of Patients with Intermittent Claudication due to Lumbar Radiculopathy Journal of spine research 1 7 1290-1294 2010/07
- Operation Range based Manipulability Measures for Grasping System WATANABE Tetsuyou Journal of the Robotics Society of Japan 28 8 923-929 2010/10
- Walking Motion Analysis of Intermittent Claudication and Its Application to Medical Diagnosis(Mechanical Systems) Transactions of the Japan Society of Mechanical Engineers. C 76 772 3446-3452 2010/12
- Comparison of walking between Hip Osteoarthritis and Lumbar Spinal Canal Stenosis Transactions of Japanese Society for Medical and Biological Engineering 49 1 34-39 2011/02
- Robots assembling machines: learning from the World Robot Summit 2018 Assembly Challenge Felix von Drigalski,Christian Schlette,Martin Rudorfer,Nikolaus Correll,Joshua C. Triyonoputro,Weiwei Wan,Tokuo Tsuji,Tetsuyou Watanabe Advanced Robotics 34 7-8 1 2020/04
- 1-Degree-of-Freedom Robotic Gripper With Infinite Self-Twist Function Toshihiro Nishimura,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe IEEE Robotics and Automation Letters 7 3 8447 2022/07
- Comparison of Effect of Soft Deformable Fingertip Stiffness on Resistible Force Focused on Change in Contact Area under Imposed Displacement Yuki Honma,Yoshinori Fujihira,Naohiko Hanajima,Masato Mizukami,Tetsuyo Watanabe Journal of the Robotics Society of Japan 39 8 771 2021/10 ?
- Effect of button layout on the exploration and learning of robot operation using an unfamiliar controller Tetsuyou Watanabe PLOS ONE 2022/09/02
- Variable-Grasping-Mode Gripper With Different Finger Structures For Grasping Small-Sized Items Tetsuyou Watanabe,Kota Morino,Yoshitatsu Asama,Seiji Nishitani,Ryo Toshima IEEE Robotics and Automation Letters 2021/07
- Robust bin-picking system using tactile sensor Sho Tajima,Seiji Wakamatsu,Taiki Abe,Masanari Tennomi,Koki Morita,Hirotoshi Ubata,Atsushi Okamura,Yuji Hirai,Kota Morino,Yosuke Suzuki,Tokuo Tsuji,Kimitoshi Yamazaki,Tetsuyou Watanabe Advanced Robotics 34 7-8 1 2020/04
- Development of assembly system with quick and low-cost installation Masanari Tennomi,Atsushi Okamura,Yuta Nakamura,Taiki Abe,Seiji Wakamatsu,Sho Tajima,Toshihiro Nishimura,Yuji Hirai,Takuro Sawada,Naoki Ichikawa,Tokuo Tsuji,Kimitoshi Yamazaki,Yosuke Suzuki,Tetsuyou Watanabe Advanced Robotics 34 7-8 1 2020/04
- Single-Fingered Reconfigurable Robotic Gripper With a Folding Mechanism for Narrow Working Spaces Toshihiro Nishimura,Tsubasa Muryoe,Yoshitatsu Asama,Hiroki Ikeuchi,Ryo Toshima,Tetsuyou Watanabe IEEE Robotics and Automation Letters 7 4 10192 2022/10
- Soft robotic hand with finger-bending/friction-reduction switching mechanism through 1-degree-of-freedom flow control Toshihiro Nishimura,Kensuke Shimizu,Seita Nojiri,Kenjiro Tadakuma,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe IEEE Robotics and Automation Letters 7 2 5695 2022/04
- Special issue on Industrial Robot Technology–Selected Papers from WRS 2018 Watanabe, T.,Harada, K.,Tsuji, T. Advanced Robotics 34 7-8 407 2020
- Effects of task type and aging on translational body movements while walking under multiple task conditions Yui Murakami,Miho Shogenji,Tetsuyou Watanabe Journal of Nursing Science and Engineering 8 1 2020/10
- Highly Articulated Tube Mechanism With Variable Stiffness and Shape Restoration Using a Pneumatic Actuator Issei Onda,Kenjiro Tadakuma,Masahiro Watanabe,Kazuki Abe,Tetsuyou Watanabe,Masashi Konyo,Satoshi Tadokoro IEEE Robotics and Automation Letters 7 2 3664 2022/04
- Grasping Strategy for Unknown Objects Based on Real-Time Grasp-Stability Evaluation Using Proximity Sensing Yosuke Suzuki,Ryoya Yoshida,Tokuo Tsuji,Toshihiro Nishimura,Tetsuyou Watanabe IEEE Robotics and Automation Letters 7 4 8643 2022/10
- Lightweight High-Speed and High-Force Gripper for Assembly Toshihiro Nishimura,Takeshi Takaki,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe IEEE/ASME Transactions on Mechatronics 1 2023
- Integrating force and vision feedback for flexible assembly system Kenta Tabata,Tokuo Tsuji,Atsushi Kawakubo,Riku Kobayashi,Takayuki Yamabe,Yosuke Suzuki,Toshihiro Nishimura,Kimitoshi Yamazaki,Tatsuya Ishiti,Tetsuyou Watanabe Advanced Robotics 37 17 1100 2023/08/24
- Single-Motor-Driven (4 + 2)-Fingered Robotic Gripper Capable of Expanding the Workable Space in the Extremely Confined Environment Toshihiro Nishimura,Keisuke Akasaka,Subaru Ishikawa,Tetsuyou Watanabe IEEE Robotics and Automation Letters 2024/12
- Development of a Flexible Thin Wearable Device for Tuning Temperature, Humidity, and Surface Friction on Its Surface Toshihiro Nishimura,Natsuko Kuramata,Seita Nojiri,Yuki Horiuchi,Kenjiro Tadakuma,Tetsuyou Watanabe Applied Sciences 13 14 8352 2023/07/19 ?
- Local Curvature Estimation and Grasp Stability Prediction Based on Proximity Sensors on a Multi-Fingered Robot Hand Yosuke Suzuki,Ryoya Yoshida,Tokuo Tsuji,Toshihiro Nishimura,Tetsuyou Watanabe Journal of Robotics and Mechatronics 35 5 1340 2023/10/20
- High-payload and self-adaptive robotic hand with 1-degree-of-freedom translation/rotation switching mechanism Toshihiro Nishimura,Tsubasa Muryoe,Tetsuyou Watanabe IEEE Robotics and Automation Letters 2023
- Single-Motor Robotic Gripper With Multi-Surface Fingers for Variable Grasping Configurations Toshihiro Nishimura,Yosuke Suzuki,Tokuo Tsuj,Tetsuyou Watanabe IEEE Robotics and Automation Letters 2024/05
- Hand Grasping Assist Glove Combining Exoskeleton Structure and Pneumatically Driven Actuator Harumasa Ishisaki,Kenta Tabata,Tokuo Tsuji,Tetsuyou Watanabe 2023 IEEE/SICE International Symposium on System Integration (SII) 2023/01/17
- Tight Clearance Peg-in-Hole Motion Planner Using Gripper with Flexible Joint and Differential Infinity Rotatable Function of Palm Masanori Ueda,Tokuo Tsuji,Tatsuhiro Hiramitsu,Hiroaki Seki,Toshihiro Nishimura,Yosuke Suzuki,Tetsuyou Watanabe 2025 IEEE/SICE International Symposium on System Integration (SII) 949 2025/01/21
- Design, Fabrication, and Testing of a Chain Mail Jamming-Based Stiffness-Changeable Robotic Supporter Abdullah Ahmed,Zhengtao Hu,Weiwei Wan,Tetsuyou Watanabe,Jianjun Yuan,Kensuke Harada IEEE/ASME Transactions on Mechatronics 2024
- Fast and precise approximation of Minkowski sum of two rotational ellipsoids with a superellipsoid Ryunosuke Yamada,Tokuo Tsuji,Tatsuhiro Hiramitsu,Hiroaki Seki,Toshihiro Nishimura,Yosuke Suzuki,Tetsuyou Watanabe The Visual Computer 2024/06/17
- Whole Shape Estimation of Transparent Object from Its Contour using Statistical Shape Model Kaihei Okada,Riku Kobayashi,Tokuo Tsuji,Tatsuhiro Hiramitsu,Hiroaki Seki,Toshihiro Nishimura,Yosuke Suzuki,Tetsuyou Watanabe 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023/10/01
- Flexible and slim device switching air blowing and suction by a single airflow control Seita Nojiri,Toshihiro Nishimura,Kenjiro Tadakuma,Tetsuyou Watanabe IEEE Robotics and Automation Letters 2023
- Parameter Tuning Method to Improve Cycle Time of Soft Robotic Hand System Using Bayesian Optimization Tatsuki Isogai,Toshihiro Nishimura,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe 2024 IEEE/SICE International Symposium on System Integration (SII) 2024/01/08
- Fatigue Effect on Minimal Toe Clearance and Toe Activity during Walking. Yingjie Jin,Yui Sano,Miho Shogenji,Tetsuyou Watanabe Sensors (Basel, Switzerland) 22 23 2022/11/29
- Versatile Robotic System for Assembly Tasks Using Flexible Mechanism Masanori Ueda,Ryunosuke Yamada,Tokuo Tsuji,Kaihei Okada,Takehiro Nishimura,Ryota Shimizu,Yuya Otsu,Kaori Yoshino,Yosuke Suzuki,Toshihiro Nishimura,Tetsuyou Watanabe 2025 IEEE/SICE International Symposium on System Integration (SII) 1440 2025/01/21
- Variable Logic Gate Mechanism with an AND ⇄ OR Meta-Switch and its Application for Grippers Kenjiro Tadakuma,Ryotaro Kayawake,Josephine Galipon,Issei Onda,Kazuki Abe,Masahiro Watanabe,Tetsuyou Watanabe,Satoshi Tadokoro 2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) 649 2024/07/15
- Motor-Less Robotic Gripper: Driving Mechanism by Robotic Manipulator Movement Toshihiro Nishimura,Kosei Ueno,Tetsuyou Watanabe IEEE Access 2025/02
- Optimizing Motion Parameters in Soft Robotic Hands Using Bayesian Optimization: Enhancing Cycle Time, Addressing Vibration, and Repeatability Toshihiro Nishimura,Tatsuki Isogai,Yosuke Suzuki,Tokuo Tsuji,Tetsuyou Watanabe IEEE Access 2024
- Initial study of verbal and nonverbal communication training through the collaborative operation of a humanoid robot for individuals with autism spectrum disorder Tetsuyou Watanabe,Kihei Nishida,Hirokazu Kumazaki Asian Journal of Psychiatry 2025/03
- Garment Shape-Forming Actuator Unit with Variable Stiffness and Friction for Dressing and Undressing Ikumi Hayashi, Toshihiro Nishimura, Tetsuyou Watanabe Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO) 2024/12
- Cloth-Climbing Robot for Body Surface Inspection Without Clothing Removal Using Magnetic Gears Atsushi Mihara, Toshihiro Nishimura, Kenjiro Tadakuma, Tetsuyou Watanabe 2025 IEEE/SICE International Symposium on System Integration (SII) 2025/01/21
- A Stiffness-Changeable Soft Finger Based on Chain Mail Jamming Zhengtao Hu, Abdullah Ahmed, Weiwei Wan, Tetsuyou Watanabe, Kensuke Harada Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2023/05/29
- Development of a Gripper for Manipulation of Soft Line-Shaped Object
Subaru Ishikawa, Toshihiro Nishimura, and Tetsuyou Watanabe 2024 IEEE/SICE International Symposium on System Integration (SII) 2024/01/08
- LCLE: A Liquid-Cooled Laminar Electromagnet for a Soft Robotic Gripper and Heavy Object Grasping Mauricio Rodríguez,Toshihiro Nishimura,Yosuke Suzuki,Tetsuyou Watanabe 2023 IEEE 5th International Conference on BioInspired Processing (BIP) 2023/11/28
Conference Presentations
Others
- Survey of robotic manipulation studies intending practical applications in real environments -object recognition, soft robot hand, challenge program and benchmarking- Tetsuyou Watanabe, Kimitoshi Yamazaki, and Yasuyoshi Yokokohji Advanced Robotics
31 19-20 1114-1132 2017/09/02
- Communication between Applications with Yarp Watanabe Tetsuyou The Robotics Society of Japan 30 9 849-852 2012/11/01

Arts and Fieldwork
Patent
Theme to the desired joint research
Grant-in-Aid for Scientific Research
○「汗・指紋制御に基づく極小把持力把持術の開拓」(2018-2020)
○「不均一性・弾性・異方性を伴う紐状柔軟物の操作能力の確立
」(2018-2019)
○「操作嗜好性を制御して高効率操作習熟を実現するロボット操作システム」(2017-2018)
○「破壊予測・防止法に基づく次世代脳神経外科手術サポートシステム」(2016-2018)
○「スキルレベル・行動が類似の表出知提示による能動的「こつ」習得サポート」(2014-2015)
○「提示情報制御による不器用さ改善の可能性」(2012-2013)
○「操り空間モジュール化に基づく直接接触不可能物体のピンセットマニピュレーション」(2008-)
○「共焦点顕微鏡プローブと摩擦検出微細鉗子を用いた脳腫瘍の術中診断・摘出システム」(2008-)
○「スキーのための雪面特性評価法に関する研究」(2008-)
○「血管内微細振動子による血栓の破砕と低侵襲回収療法の開発」(2006-)
○「薬物を内包したリポソームの放出透過特性の解析と計測評価に関する基礎研究」(2006-)
○「薬物封入リポソームの放出特性の解析と制御技術に関する基礎研究」(2004-)
○「細胞マイクロインジェクション自動化のための穿孔技能解析」(2004-)
○「振動による凝着力緩和を利用した自動微小物体マニピュレーションシステムの開発」(2006-)
○「熱・水・風を放出制御できるロボットハンドを活用したウェットヒート柔軟物整形」(2021-2023)
○「界面洗浄・摩擦制御の実現による未知の表面特性をもつ物体の洗浄把持・操り」(2021-2023)
Competitive research funding,Contribution
Collaborative research,Consignment study
Classes (Bachelors)
○Biorobotics(2017)
○Information Processing Exercise(2017)
○Creative Design Exercise(2017)
○Creative Design Exercise(2017)
○Creative Design Exercise(2016)
○Mechanical Engineering Laboratory I(2016)
○Mechanical Engineering Laboratory II(2016)
○Creative Design Exercise(2016)
○Biorobotics(2016)
○Thesis Report(2016)
○Information Processing Exercise(2016)
○Thesis Report(2016)
○Seminar in Mechanical Engineering(2016)
Classes (Graduate Schools)
○Advanced intellectual informative and Mechanical System(2017)
○Advanced intellectual informative and Mechanical System(2017)
○Advanced intellectual informative and Mechanical System(2017)
○Measurement and control B(2017)
○Measurement and control A(2017)
○Measurement and control A(2017)
○Measurement and control B(2017)
○Information-reinforced Mechatronics balanced with Environment B(2017)
○Information-reinforced Mechatronics balanced with Environment A(2017)
○Advanced intellectual informative and Mechanical System(2017)
○Advanced intellectual informative and Mechanical System(2016)
○Measurement and control A(2016)
○Information-reinforced Mechatronics balanced with Environment A(2016)
○Measurement and control B(2016)
○Information-reinforced Mechatronics balanced with Environment B(2016)