

渡辺 哲陽 (わたなべ てつよう) 教授 WATANABE Tetsuyou
![]()
![]()
![]()
所属組織・役職等
理工研究域 フロンティア工学系
教育分野
【学士課程】
理工学域 フロンティア工学類
【大学院前期課程】
自然科学研究科 機械科学専攻
【大学院後期課程】
自然科学研究科 機械科学専攻
所属研究室等
人間・機械創造研究室
学歴
【出身大学院】
京都大学 博士課程 工学研究科 2003/03 修了
【取得学位】
博士(工学)
職歴
生年月
所属学会
計測自動制御学会
日本生体医工学会
日本機械学会
人工知能学会
看護理工学会
日本ロボット学会
IEEE
一般社団法人日本ロボット学会 理事(2024-2027)
IEEE Robotics and Automation Society Co-chair of the IEEE RAS TC on RAR(2023-2029)
看護理工学会 理事(2023-2025)
日本機会学会 ロボティクスメカトロニクス部門 欧文誌委員会(2013-2013)
日本機会学会 ロボティクスメカトロニクス部門 欧文誌委員会(2013-2013)
日本ロボット学会 会誌査読小委員会委員(2011-2013)
日本機械学会 ロボティクスメカトロニクス部門技術委員(2011-2013)
日本機械学会 ロボティクスメカトロニクス部門運営委員(2011-2013)
学内委員会委員等
○サステナブル理工学プログラム運営委員 委員(2022-2025)
○産学連携コーディネータ 委員(2022-2022)
○サステナブル理工学プログラム運営委員 委員(2022-2022)
○第三学類構想検討WG 委員(2021-2021)
○サステナブル理工学プログラムWG 委員(2021-2021)
○インターンシップ担当 委員(2021-2021)
○環境・安全衛生委員会 委員(2019-2021)
○FDリーダー その他(2016-2017)
○FD委員会 委員(2016-2017)
○教育方法改善委員会 委員(2016-2016)
○理工系教職懇談会 委員(2015-2015)
○教務委員会 委員(2015-2015)
○教務委員会 委員(2014-2014)
受賞学術賞
○SICE SI部門 研究奨励賞(2023/12)
○IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); Best Paper Award on Robot Mechanisms and Design Finalist(2022/10)
○SI2022優秀講演賞(2022/12)
○ロボティクスシンポジア最優秀賞(2023/03)
○SI2022優秀講演賞(2022/12)
○SI2022優秀講演賞(2022/12)
○SICE SI部門 研究奨励賞(2022/12)
○SI2022優秀講演賞(2022/12)
○IEEE International Conference on Soft Robotics; Best Poster Award(2022/04)
○SI2021優秀講演賞(2021/12)
○ロボティクスシンポジア優秀賞(2022/03)
○日本看護理工学会学術集会 研究奨励賞(2020/10/25)
○IROS 2019 Robotic Grasping and Manipulation Competition: Logistics Track 2nd place(2019/11/05)
○IROS 2019 Robotng andic Graspi Manipulation Competition: Manufacturing Track 3rd place(2019/11/05)
○IEEE RoboSoft Best Poster Finalist(2018/04/26)
○SI2018 優秀講演(2019/03/05)
○Second Prize of World Robot Challenge Industrial Robotics Category(2018/10/21)
○計測自動制御学会論文賞(2017/09/21)
○ロボティクスシンポジア最優秀賞(2018/03/14)
○SI2017 優秀講演(2017/12/23)
○SI2016 優秀講演(2016/12/18)
○計測自動制御学会システムインテグレーション部門貢献表彰(2014/12)
○SI2012 優秀講演(2012/12/20)
○生体医工学シンポジウムベストレビューワーアワード(2013/09/20)
○日本機械学会奨励賞(研究)(2010/04/23)
○MAGDA優秀講演論文賞(2005/03)
○日本ロボット学会研究奨励賞(2008/09/10)
専門分野
、知能ロボティクス、、医用システム、知能機械学・機械システム
専門分野キーワード
ロボティクス、ロボットハンド、マニピュレーション、人間支援、医療工学
研究課題
ロボット技術の医療応用
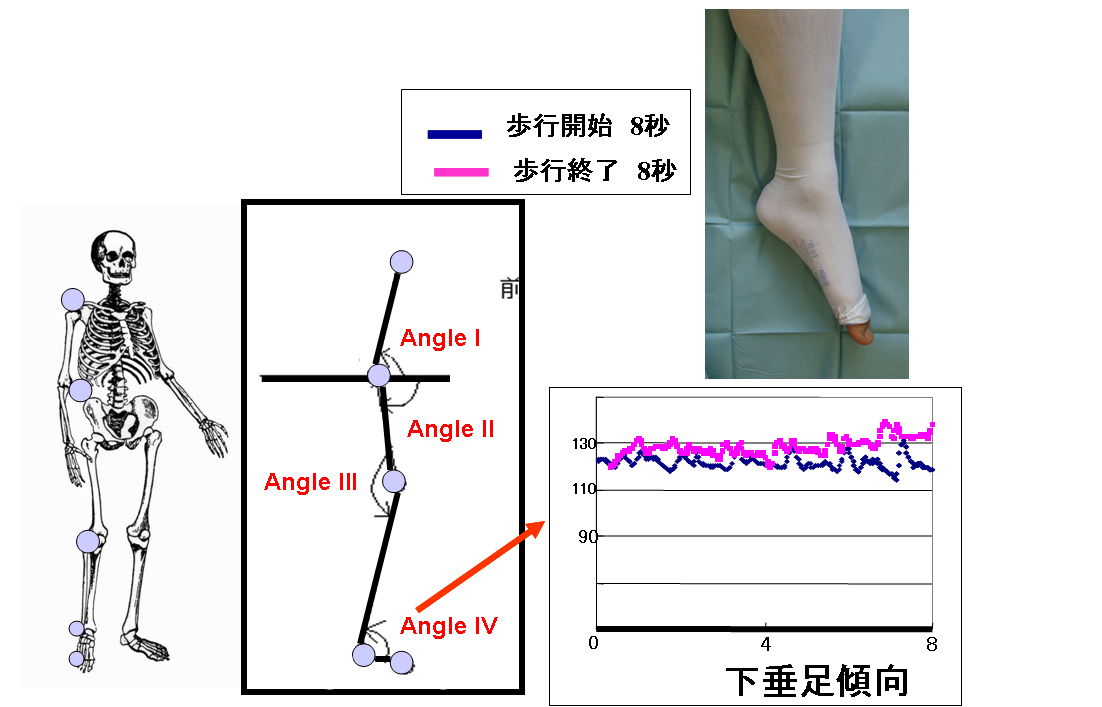 しばらく歩くと下半身に痛みを覚え歩けなくなるが,しばらく休むと歩くことができる症状があり,間欠跛行と呼ばれる.その主原因は2種類ある.動脈硬化などによる血流障害と神経圧迫などによる神経障害である.本研究では,人間の歩行をカメラで計測し,得た画像を解析することで,主原因を判別するシステムを構築している.
しばらく歩くと下半身に痛みを覚え歩けなくなるが,しばらく休むと歩くことができる症状があり,間欠跛行と呼ばれる.その主原因は2種類ある.動脈硬化などによる血流障害と神経圧迫などによる神経障害である.本研究では,人間の歩行をカメラで計測し,得た画像を解析することで,主原因を判別するシステムを構築している.
振動による凝着力緩和とその微細操作への応用
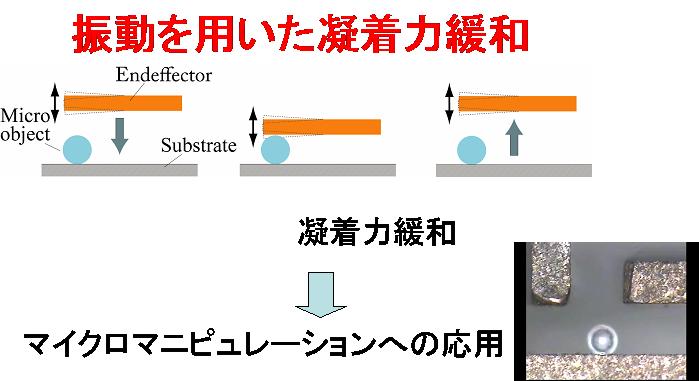 マイクロ領域では,寸法効果のため,ファン・デル・ワールス力,表面張力,静電気力などの凝着力が支配的となる.この凝着力に対応する手法として,振動により凝着力を緩和する手法を提案している.エンドエフェクタを微細振動させながら,テーブル(基盤)上にある対象物に接触させる(近づける)と,テーブル(基盤)と対象物の間に比べ,エンドエフェクタと対象物の間の凝着力が小さくなる.この手法を用いると,マクロ領域の操作のように物体を操作できる.この手法をもとに,自動で様々なマイクロマニピュレーションを行う手法の開発に取り組んでいる.
マイクロ領域では,寸法効果のため,ファン・デル・ワールス力,表面張力,静電気力などの凝着力が支配的となる.この凝着力に対応する手法として,振動により凝着力を緩和する手法を提案している.エンドエフェクタを微細振動させながら,テーブル(基盤)上にある対象物に接触させる(近づける)と,テーブル(基盤)と対象物の間に比べ,エンドエフェクタと対象物の間の凝着力が小さくなる.この手法を用いると,マクロ領域の操作のように物体を操作できる.この手法をもとに,自動で様々なマイクロマニピュレーションを行う手法の開発に取り組んでいる.
ロボットハンドによる物体の把持・操り
著書
論文
- Facebookをプラットフォームとしたポスター形式の学術講演会のオンライン化の試み(Robomech 2020の検証) 福井類,渡辺哲陽 日本機械学会論文集 2021/01 査読有 原著論文 研究論文(学術雑誌)
- 強制変位下での接触面積の変化に着目した剛性の異なる軟体指の把持耐力への影響の比較 本間 勇輝 and 藤平 祥孝 and 花島 直彦 and 水上 雅人 and 渡辺 哲陽 日本ロボット学会誌 2021/02 査読有 原著論文 研究論文(学術雑誌)
- Abdominal Stiffness Evaluation in Massage for Constipation. Sensors (Basel, Switzerland) 21巻 4号 2021/02/08 原著論文 研究論文(学術雑誌)
- Feature Assessment of Toe Area Activity during Walking of Elderly People with Stumbling Experiences Through Wearable Clog-Integrated Plantar Visualization System Yingjie Jin, Miho Shogenji, and Tetsuyou Watanabe Applied Sciences 10巻 4号 1359頁 2020/02 査読有 原著論文 研究論文(学術雑誌)
- Specific aspects of operating an unfamiliar touchscreen for individuals with autism spectrum disorders Tetsuyou Watanabe, Hirokazu Kumazaki, Taro Muramatsu, Masaru Mimura Psychiatry and clinical neurosciences 74巻 2号 157-158頁 2020/02 査読有 原著論文 研究論文(学術雑誌)
- Feasibility of autism-focused public speech training using a simple virtual audience for autism spectrum disorder. Hirokazu Kumazaki, Taro Muramatsu, Kazuki Kobayashi, Tetsuyou Watanabe, Kazunori Terada, Haruhiro Higashida, Teruko Yuhi, Masaru Mimura, Mitsuru Kikuchi Psychiatry and clinical neurosciences 74巻 2号 124-131頁 2020/02 査読有 原著論文 研究論文(学術雑誌)
- Method for the Detection of Tumor Blood Vessels in Neurosurgery Using a Gripping Force Feedback System Hiroki Yokota, Takeshi Yoneyama, Tetsuyou Watanabe, Yasuo Sasagawa and Mitsutoshi Nakada Sensors 19巻 23号 5157頁 2019/11 査読有 原著論文 研究論文(学術雑誌)
- Hierarchical Proximity Sensor for High-Speed and Intelligent Control of Robotic Hand Yuji Hirai, Takuya Mizukami, Yosuke Suzuki, Tokuo Tsuji, and Tetsuyou Watanabe Journal of Robotics and Mechatronics 31巻 3号 453-463頁 2019/06 査読有 原著論文 研究論文(学術雑誌)
- Deformable Fingertip with a Friction Reduction System Based on Lubricating Effect for Smooth Operation under Both Dry and Wet Conditions Kaori Mizushima and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe Advanced Robotics 33巻 10号 508-519頁 2019/04 査読有 原著論文 研究論文(学術雑誌)
- Wearable Trip-Risk Monitoring System Based on Plantar Information Yingjie Jin, Miho Shogenji, Tetsuyou Watanabe Proceedings of the IEEE/SICE International Symposium on System Integration (SII) 573-578頁 2020/01 査読有 原著論文 研究論文(プロシーディング)
- High-speed gripper with position-alignment functionality based on quick-return mechanism Masanari Tennomi, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Advances in Mechanism and Machine Science. IFToMM WC 2019. Mechanisms and Machine Science 2585-2597頁 2019/07 査読有 原著論文 研究論文(プロシーディング)
- Development of Contact Area Variable Surface for Manipulation Requiring Sliding Seita Nojiri, Kaori Mizushima, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft) 131-136頁 2019/04 査読有 原著論文 研究論文(プロシーディング)
- ソフトロボットハンドによるマニピュレーション 渡辺哲陽 日本ロボット学会誌 37巻 1号 30-33頁 2019/01 査読有 解説 研究論文(学術雑誌)
- 実環境における実応用に向けた物体操作研究 渡辺 哲陽, 山崎 公俊, 横小路 泰義 日本ロボット学会誌 36巻 5号 338-347頁 2018/06 査読有 解説 研究論文(学術雑誌)
- Development of disposable pressure sensible retractor system for preventing the overloading Masahiko Watanabe and Takeshi Yoneyama and Mitsutoshi Nakada and Tetsuyou Watanabe 129-134頁 2019/01 査読有 原著論文 研究論文(プロシーディング)
- High-Speed and Intelligent Pre-Grasp Motion by a Robotic Hand Equipped with Hierarchical Proximity Sensors Youji Hirai and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe 7424-7431頁 2018/10 査読有 原著論文 研究論文(プロシーディング)
- Multi-Fingered Robotic Hand Based on Hybrid Mechanism of Tendon-Driven and Jamming Transition Kaori Mizushima and Takumi Oku and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe 376 - 381頁 2018/04 査読有 原著論文 研究論文(プロシーディング)
- Tough, Bendable and Stretchable Tactile Sensors Array for Covering Robot Surfaces Youji Hirai and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe 276-281頁 2018/04 査読有 原著論文 研究論文(プロシーディング)
- Adaptive Gripper with Soft Sheets for a Uniformly Distributed Grasping Force Yoshiyuki Furuta and Tokuo Tsuji and Yosuke Suzuki and Tetsuyou Watanabe and Masatoshi Hikizu and Hiroaki Seki 373-378頁 2017/12 査読有 原著論文 研究論文(プロシーディング)
- Hierarchical Proximity Sensor for High-Speed and Intelligent Control of Robotic Hand Yuji Hirai and Takuya Mizukami and Yosuke Suzuki and Tokuo Tsuji and Tetsuyou Watanabe Journal of Robotics and Mechatronics 2019/03 査読有 原著論文 研究論文(学術雑誌)
- Bright spot analysis for photodynamic diagnosis of brain tumors using confocal microscopy Takeshi Yoneyama and Tetsuyo Watanabe and Sho Tamai and Katsuyoshi Miyashita, Mitsutoshi Nakada Photodiagnosis and Photodynamic Therapy 25巻 463-471頁 2019/03 査読有 原著論文 研究論文(学術雑誌)
- Fluid Pressure Monitoring-Based Strategy for Delicate Grasping of Fragile Objects by A Robotic Hand with Fluid Fingertips Toshihiro Nishimura, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe Sensors 19巻 4号 782頁 2019/02 査読有 原著論文 研究論文(学術雑誌)
- 腰部加速度変化量に基づく多重課題が歩容バランスに与える影響評価 前田宏行,生源寺美穂,渡辺哲陽 看護理工学会誌 5巻 2号 110-117頁 2018/07 査読有 原著論文 研究論文(学術雑誌)
- Lightweight, High-Force Gripper Inspired by Chuck Clamping Devices 3巻 3号 1354-1361頁 2018/07 査読有 原著論文 研究論文(学術雑誌)
- Finger-attachment device for the feedback of gripping and pulling force in a manipulating system for brain tumor resection 13巻 1号 3-12頁 2018/01 査読有 原著論文 研究論文(学術雑誌)
- Microgripper-embedded fluid fingertip-enhancing positioning and holding abilities for versatiale grasping 9巻 6号 Paper No: JMR-16-1232頁 2017/10 査読有 原著論文 研究論文(学術雑誌)
- Survey of robotic manipulation studies intending practical applications in real environments -object recognition, soft robot hand, challenge program and benchmarking- Tetsuyou Watanabe, Kimitoshi Yamazaki, and Yasuyoshi Yokokohji 31巻 19-20号 1114-1132頁 2017/09 査読有 原著論文 研究論文(学術雑誌)
- Surface Texture of Deformable Robotic Fingertips for a Stable Grasp under both Dry and Wet Conditions 2巻 4号 2048-2055頁 2017/06 査読有 原著論文 研究論文(学術雑誌)
- A Force-Visualized Silicone Retractor Attachable to Surgical Suction Pipes
17巻 4号 773頁 2017/04 査読有 原著論文 研究論文(学術雑誌)

- Peg-in-Hole under State Uncertainties via a Passive Wrist Joint with Push-Activate-Rotation Function 67-74頁 2017/11 査読有 原著論文 研究論文(プロシーディング)
- Thin plate manipulation by an under-actuated robotic soft gripper utilizing the environment 1236-1243頁 2017/09 査読有 原著論文 研究論文(プロシーディング)
- Gear-Rack based Underactuated Robotic Hand 1133-1135頁 2017/09 査読有 原著論文 研究論文(プロシーディング)
- Clog-Integrated Plantar Visualization System for Evaluating Activity During Walking 862-867頁 2017/07 査読有 原著論文 研究論文(プロシーディング)
- Haptic threshold for pulling force feedback on surgeon's fingertip in medical robotic systems Hiroyuki Chinbe, Takeshi Yoneyama, Tetsuyou Watanabe, Nakada Mitsutoshi Proceedings of the Annual Conference of IEEE Industrial Electronics Society (IECON) 2016/10 査読有 原著論文 研究論文(プロシーディング)
- Wheelchair Control Based on a Polynomial Function Approximating a User's Gaze Curve Sawako Furuya, Alexander Alexopoulos, Essameddin Badreddin, Tetsuyou Watanabe Proceedings of the IEEE/SICE International Symposium on System Integration (SII) 2016/12 査読有 原著論文 研究論文(プロシーディング)
- Evaluation of walking balance based on pose difference between normal walk and walk under multi-task conditions, Journal of Robotics and Mechatronics Hiroyuki Maeda, Miho Shogenji, Tetsuyou Watanabe Journal of Robotics and Mechatronics 29巻 2号 2017/04 査読有 原著論文 研究論文(学術雑誌)
- Fluorescence intensity and bright spot analyses using a confocal microscope for photodynamic diagnosis of brain tumors Takeshi Yoneyama, Tetsuyo Watanabe, Hiroyuki Kagawa, Yutaka Hayashi, Mitsutoshi Nakada Photodiagnosis and Photodynamic Therapy 17巻 13-21頁 2017/01 査読有 原著論文 研究論文(学術雑誌)
- Variable-grasping-mode underactuated soft gripper with environmental contact-based operation Toshihiro Nishimura, Kaori Mizushima, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe IEEE Robotics and Automation Letters 2巻 2号 1164-1171頁 2017/01 査読有 原著論文 研究論文(学術雑誌)
- Force-Sensing Silicone Retractor for Attachment to Surgical Suction Pipes etsuyou Watanabe, Takanobu Iwai, Yoshinori Fujihira, Lina Wakako, Hiroyuki Kagawa and Takeshi Yoneyama Sensors 16巻 7号 1133頁 2016/07 査読有 原著論文 研究論文(学術雑誌)
- Stiffness Measurement System Using Endoscopes with a Visualization Method Tetsuyou Watanabe, Toshio Koyama, Takeshi Yoneyama, and Mitsutoshi Nakada IEEE Sensors Journal 16巻 15号 5889 - 5897頁 2016/05 査読有 原著論文 研究論文(学術雑誌)
- Bent Sheet Grasping Stability for Sheet Manipulation
Yoshinori Fujihira, Toshihiro Nishimura, and Tetsuyou Watanabe IEEE Robotics and Automation Letters 1巻 1号 415-422頁 2016/01 査読有 原著論文 研究論文(学術雑誌)
- Gait Analysis Using Support Vector Machine as a Classification Method for Lumbar Spinal Canal Stenosis
"Hiroyuki Hayashi, Yasumitsu Toribatake, Hideki Murakami, Takeshi Yoneyama, Tetsuyou Watanabe, and Hiroyuki Tsuchiya " Orthopedics 38巻 11号 e959-e964頁 2015/11 査読有 原著論文 研究論文(学術雑誌)
- Differences in gait characteristics of patients with lumbar spinal canal stenosis (L4 radiculopathy) and those with osteoarthritis of the hip
"Noriaki Yokogawa, Yasumitsu Toribatake, Hideki Murakami, Hiroyuki Hayashi, Takeshi Yoneyama, Tetsuyou Watanabe, and Hiroyuki Tsuchiya " PLOS ONE 10巻 4号 e0124745頁 2015/04 査読有 原著論文 研究論文(学術雑誌)
- 接触面を考慮したソフトフィンガ型把持の安定性評価 原田研介,辻 徳生,藤平祥孝,渡辺哲陽,宇都宗一郎,山野辺夏樹,永田和之,北垣高成 計測自動制御学会論文集 52巻 2号 83-91頁 2015/02 査読有 原著論文 研究論文(学術雑誌)
- Delicate Food Grasping by Robotic Gripper with Viscoelastic Fluid-based Deformable Fingertips Tetsuyou Watanabe, Ryoji Maruyama, Masahiro Uchida Transaction on Control and Mechanical Systems 3巻 3号 2014/09 査読有 原著論文 研究論文(学術雑誌)
- New Condition for Tofu Stable Grasping with Fluid Fingertips Toshihiro Nishimura, Yoshinori Fujihira, Ryota Adachi, Tetsuyou Watanabe Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (CASE) 2016 査読有 原著論文 研究論文(プロシーディング)
- Incompressible Liquid Based Force Sensible Silicone Retractor Attachable to Surgical Suction Instruments Toshio Koyama, Takeshi.Yoneyama, Mitsutoshi Nakada, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 1398-1404頁 2016 査読有 原著論文 研究論文(プロシーディング)
- Possibility of human detection through vision-based safety system Kobayashi, Takeshi and Watanabe, Tetsuyou Proceedings of The 6th International Conference on Advanced Mechatronics (ICAM2015) 2015 査読有 原著論文 研究論文(プロシーディング)
- Performance evaluation of the silicone retractor with force sensing function for surgical suction devices Koyama, Toshio and Iwai, Takanobu and Hayashi, Yutaka and Nakada, Mitsutoshi and Kagawa, Hiroyuki and Yoneyama, Takeshi and Watanabe, Tetsuyou Proceedings of The 6th International Conference on Advanced Mechatronics (ICAM2015) 2015 査読有 原著論文 研究論文(プロシーディング)
- Identification of Danger State for Grasping Delicate Tofu with Fingertips Containing Viscoelastic Fluid Ryota Adachi, Yoshinori Fujihira, and Tetsuyou Watanabe Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 497-503頁 2015 査読有 原著論文 研究論文(プロシーディング)
- Visualization Method Based Stiffness Sensing System for Endoscopes Takanobu Iwai, Toshio Koyama, Hiroyuki Kagawa, Takeshi Yoneyama, Tetsuyou Watanabe Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 6449-6452頁 2015 査読有 原著論文 研究論文(プロシーディング)
- The effect of behavioral preferences on skill acquisition in determining unspecified, suitable action patterns to control humanoid robots Taiki Takayama, Tetsuyou Watanabe Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 7586-7589頁 2015 査読有 原著論文 研究論文(プロシーディング)
- Silicone retractor with embedded force-sensing function for attachment to surgical suction pipes Toshio Koyama, Takanobu.Iwai, Takeshi.Yoneyama, Hiroyuki.Kagawa, Yutaka.Hayashi, Mitsutoshi Nakada, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 145-150頁 2015 査読有 原著論文 研究論文(プロシーディング)
- Experimental Investigation of Effect of Fingertip Stiffness on Resistible Force in Grasping Yoshinori Fujihira and Tetsuyou Watanabe Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 4334-4340頁 2015 査読有 原著論文 研究論文(プロシーディング)
- Design of Flexible Micro Manipulator for Neurosurgery Katsuyuki Tanaka, Takeshi Yoneyama, Tetsuyou Watanabe, Hiroyuki Kagawa, Yoshinori Fujihira, Takuya Hanyu, Yusuke Kanada, Yutaka Hayashi, Mitsutoshi Nakada Proceedings of International Conference on Precision Engineering (ICPE) 2014 査読有 原著論文 研究論文(プロシーディング)
- Three-axis force visualizing system for fiberscopes utilizing highly elastic fabric Takanobu Iwai, Yoshinori Fujihira, Lina Wakako, Hiroyuki Kagawa, Takeshi Yoneyama, Tetsuyou Watanabe Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 1110-1115頁 2014 査読有 原著論文 研究論文(プロシーディング)
- Experimental investigation of effect of fingertip stiffness on friction while grasping an object etsuyou Watanabe, Yoshinori Fujihira Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 889-894頁 2014 査読有 原著論文 研究論文(プロシーディング)
- Identification of the causative disease of intermittent claudication through walking motion analysis: Feature analysis and differentiation
Watanabe T., Yoneyama T., Hayashi H., Toribatake Y. Scientific World Journal 2014巻 Article ID 861529頁 2014/07 査読有 原著論文 研究論文(学術雑誌)
- Force Sensor Attachable to Thin Fiberscopes/Endoscopes Utilizing High Elasticity Fabric Tetsuyou Watanabe, Takanobu Iwai, Yoshinori Fujihira, Lina Wakako, Hiroyuki Kagawa and Takeshi Yoneyama Sensors 14巻 3号 5207-5220頁 2014/03 査読有 原著論文 研究論文(学術雑誌)
- Gripping Force Feedback System for Neurosurgery Yoshinori Fujihira, Takuya Hanyu, Yusuke Kanada, Takeshi Yoneyama, Tetsuyou Watanabe and Hiroyuki Kagawa International Journal of Automation Technology 8巻 1号 83-94頁 2014/01 査読有 原著論文 研究論文(学術雑誌)
- Touchscreen User Motion Anticipation for Usability Improvement Proceedings of the Seventh International Conference on Advances in Computer-Human Interactions (ACHI) 264-270頁 2014/03 査読有 原著論文 研究論文(プロシーディング)
- Design of a Desirable Trajectory and Convergent Control for 3-D.O.F Manipulator with a Nonholonomic Constraint Tsuneo Yoshikawa, Keigo Kobayashi, and Tetsuyo Watanabe Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2000号 2684-2689頁 2000/04 査読有 原著論文 研究論文(プロシーディング)
- Dynamic Control of Soft-finger Hands for Pivoting an Object in Contact with the Environment Tetsuyoh Watanabe and Tsuneo Yoshikawa Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2000号 324-329頁 2000/11 査読有 原著論文 研究論文(プロシーディング)
- Dynamic Control of Multifingered Hands for Pivoting Operation Tetsuyoh Watanabe and Tsuneo Yoshikawa Proceedings of the International Symposium on Robotics (ISR) 2001号 1260-1265頁 2001/04 査読有 原著論文 研究論文(プロシーディング)
- Optimization of Power Grasps for Multiple Objects Tsuneo Yoshikawa, Tetsuyo Watanabe, and Mutsuo Daito Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2001号 1786-1791頁 2001/05 査読有 原著論文 研究論文(プロシーディング)
- Optimization of Grasping by Using a Required External Force Set Tetsuyou Watanabe and Tsuneo Yoshikawa Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2003号 1127-1132頁 2003/09 査読有 原著論文 研究論文(プロシーディング)
- Optimization of Grasping an Object by Using Required Acceleration and Equilibrium-Force Sets Tetsuyou Watanabe and Tsuneo Yoshikawa Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 2003号 338-343頁 2003/07 査読有 原著論文 研究論文(プロシーディング)
- Study on In-vivo Measuring Method of Solubility for Cerebral Thrombus Dissolution Zhongwei Jiang, Minoru Morita, Tetsuyou Watanabe, Shoichi Kato and Michiyasu Suzuki Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT) 2003号 356-361頁 2003/12 査読有 原著論文 研究論文(プロシーディング)
- Development of Vital Signs Measuring Network System for Mental Stress Estimation Samjin Choi, Zhongwei Jiang and Tetsuyou Watanabe Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT) 2003号 345-350頁 2003/12 査読有 原著論文 研究論文(プロシーディング)
- Mechanics of Hybrid Active/Passive-Closure Grasps Tetsuyou Watanabe, Zhongwei Jiang and Tsuneo Yoshikawa Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2004号 1252-1257頁 2004/04 査読有 原著論文 研究論文(プロシーディング)
- Micromanipulation using squeeze effect Tetsuyou Watanabe, Nobuhiro Fujino and Zhongwei Jiang Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2004号 3357-3362頁 2004/09 査読有 原著論文 研究論文(プロシーディング)
- Object Manipulation under Hybrid Active/Passive Closure Tetsuyou Watanabe, Kensuke Harada, Zhongwei Jiang and Tsuneo Yoshikawa Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2005号 1025-1032頁 2005/04 査読有 原著論文 研究論文(プロシーディング)
- Mechanism of Micro Manipulation using Oscillation Tetsuyou Watanabe and Zhongwei Jiang Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2006号 661-668頁 2006/05 査読有 原著論文 研究論文(プロシーディング)
- Study on Design of Micro-stirrer for Thrombus Dissolution Minoru Morita, Zhongwei Jiang, Tetsuyou Watanabe, Naoki Chijimatsu and Gang Lei Proceedings of the ASME/JSME Joint Conference on Micromechatronics for Information and Precision Equipment (MIPE) 2006号 S22_01頁 2006/06 査読有 原著論文 研究論文(プロシーディング)
- Towards Whole Arm Manipulation by Contact State Transition Tetsuyou Watanabe, Kensuke Harada, Tsuneo Yoshikawa and Zhongwei Jiang Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2006号 5682-5687頁 2006/10 査読有 原著論文 研究論文(プロシーディング)
- Joint Torque-velocity Pair Based Manipulability for manipulators Tetsuyou Watnabe Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT)(Proceedings of SPIE) 6794巻 679427-1-679427-7頁 2007/12 査読有 原著論文 研究論文(プロシーディング)
- Adhesion state detection by vision and its application to automatic micro manipulation Tetsuyou Watnabe, Yutaka Serita Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2008号 458-463頁 2008/09 査読有 原著論文 研究論文(プロシーディング)
- Joint Torque-velocity Pair Based Manipulability for Grasping System Tetsuyou Watnabe Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2008号 2264-2270頁 2008/09 査読有 原著論文 研究論文(プロシーディング)
- Study on Adhesion Force Reduction and State Estimation by Piezo-transducer Tetsuyou Watanabe , Makoto Iwasaki, Hidekazu Matsumura, and ZhongWei Jiang Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2009号 2009/05 査読有 原著論文 研究論文(プロシーディング)
- Grasp Motion Planning for box opening task by multi-fingered hands and arms Tetsuyou Watanabe and Michael Beetz Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA2009) 2009号 1-7頁 2009/12 査読有 原著論文 研究論文(プロシーディング)
- Development of a Multi-fingered Robot Hand with Softness-changeable Skin Mechanism Hiroki Takeuchi and Tetsuyou Watanabe Proceedings of the International Symposium on Robotics (ISR) 2010号 606-612頁 2010/06 査読有 原著論文 研究論文(プロシーディング)
- Walking Motion Analysis of Intermittent Claudication and its Application to Medical Diagnosis Tetsuyou Watanabe, Yui Sanou, Takeshi Yoneyama, Yasumitsu Toribatake, Hiroyuki Hayashi and Noriaki Yokogawa Proceedings of the 2010 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2010号 448-453頁 2010/09 査読有 原著論文 研究論文(プロシーディング)
- Manipulability Measures taking Necessary Joint Torques for Grasping into consideration Tetsuyou Watanabe Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2010号 598-603頁 2010/10 査読有 原著論文 研究論文(プロシーディング)
- Force Detecting Gripper and Flexible Micro Manipulator for Neurosurgery Takeshi Yoneyama, Tetsuyou Watanabe, Hiroyuki Kagawa, Junichiro Hamada, Yutaka Hayashi, Mitsutoshi Nakada Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2011号 2011/08 査読有 原著論文 研究論文(プロシーディング)
- Key posture Extraction from Object Manipulations Experiments Nicholas B. Melo, Tetsuyou Watanabe Proceedings of the International Conference on Mechatronics and Information Technology (ICMIT) 2011号 2011/08 査読有 原著論文 研究論文(プロシーディング)
- Softness Effects on Manipulability and Grasp Stability Tetsuyou Watanabe Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2011号 1398-1404頁 2011/09 査読有 原著論文 研究論文(プロシーディング)
- Grasp input optimization taking contact position uncertainty into consideration Papat Fungtammasan, Tetsuyou Watanabe Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO) 2011号 2011/12 査読有 原著論文 研究論文(プロシーディング)
- Mechanism of tweezers grasping system Papat Fungtammasan, Tetsuyou Watanabe Proceedings of 2011 IEEE/SICE International Symposium on System Integration (SII) 2011号 744-749頁 2011/12 査読有 原著論文 研究論文(プロシーディング)
- Force detecting gripper and force feedback system for neurosurgery Takeshi Yoneyama, Tetsuyou Watanabe, Hiroyuki Kagawa, Junichiro Hamada, Yutaka Hayashi, Mitsutoshi Nakada Proceedings of international congress and exhibition on computer assisted radiology and surgery (CARS) 2012号 2012/06 査読有 原著論文 研究論文(プロシーディング)
- Study on differentiation factors for main disease identification of intermittent claudication Tetsuyou Watanabe, Takeshi Yoneyama, Yasumitsu Toribatake, Hiroyuki Hayashi and Noriaki Yokogawa Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2012号 4696-4699頁 2013/08 査読有 原著論文 研究論文(プロシーディング)
- Discrimination of a Brain Tumor Region through MicroscaleEvaluation of Fluorescence Using Confocal Microscopy Takuma Katahira, Takeshi Yoneyama, Tiantian Feng, Tetsuyou Watanabe, Hiroyuki Kagawa, Junichiro Hamada, Yutaka Hayashi, Mitsutoshi Nakada Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2013号 2013/06 査読有 原著論文 研究論文(プロシーディング)
- Force feedback manipulating system for neurosurgery Yusuke KANADA, Takeshi YONEYAMA, Tetsuyo WATANABE, Hiroyuki KAGAWA, Norifumi SUGIYAMA, Kazuya TANAKA, Takuya HANYU Procedia CIRP 2013号 6409-6412頁 2013/06 査読有 原著論文 研究論文(プロシーディング)
- Main disease classification of intermittent claudication via L1-regularized SVM Tetsuyou Watanabe, Takeshi Yoneyama, Yasumitsu Toribatake and Hiroyuki Hayashi Proceedings of International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2013号 6409-6412頁 2013/06 査読有 原著論文 研究論文(プロシーディング)
- Evaluation of differences in the gait characteristics of patients with lumbar spinal canal stenosis (L4 radiculopathy) and osteoarthritis of the hip by using a new motion analysis method Noriaki Yokogawa, Yasumitsu Toribatake, Hideki Murakami, Hiroyuki Hayashi, Takeshi Yoneyama, Tetsuyou Watanabe and Hiroyuki Tsuchiya Proceedings of EuroSpine 2012号 2012/01 査読有 原著論文 研究論文(プロシーディング)
- Effect of visual cues on line drawing performance Tetsuyou Watanabe Proceedings of IEEE International Conference on System, Man and Cybernetics (SMC) 2013/10 査読有 原著論文 研究論文(プロシーディング)
- Force-detecting gripper and force feedback system for neurosurgery applications International Journal for Computer Assisted Radiology and Surgery 2013/01 査読有 原著論文 研究論文(学術雑誌)
- 非圧縮性流体指からなるロボットハンドによる壊れやすい対象物の把持 日本ロボット学会誌 2013/09 査読有 原著論文 研究論文(学術雑誌)
- 脳腫瘍摘出手術のための力検出多自由度微細マニピュレータの開発 山下裕司,藤平祥孝,米山猛,渡辺哲陽,香川博之,濵田潤一郎,林 裕,中田光俊 生体医工学 50巻 4号 329-339頁 2012/08 査読有 原著論文 研究論文(学術雑誌)
- Grasp input optimization taking contact position and object information uncertainties into consideration Papat Fungtammasan and Tetsuyou Watanabe IEEE Transactions on robotics 28巻 5号 1170-1177頁 2012/06 査読有 原著論文 研究論文(学術雑誌)
- 脳腫瘍識別を目指した共焦点顕微鏡による腫瘍観察 栂野浩太郎,米山猛,濱田潤一郎,林裕,中田光俊,渡辺哲陽,香川博之 生体医工学 50巻 1号 50-67頁 2012/02 査読有 原著論文 研究論文(学術雑誌)
- Adhesion Forces Reduction by Oscillation and Its Application to Micro Manipulation Tetsuyou Watanabe and ZhongWei Jiang Cutting Edge Robotics 2009 199-214頁 2010/09 査読有 原著論文 研究論文(学術雑誌)
- Task Based Hybrid Closure Grasping Optimization for Autonomous Robot Hand Tetsuyou Watanabe, ZhongWei Jiang, Tsuneo Yoshikawa Design and Control of Intelligent Robotic Systems 425-451頁 2009/02 査読有 原著論文 その他
- 腰部脊柱管狭窄(第4腰椎神経根障害)と変形性股関節症における歩行容態の相違点 工学系動作解析法による評価 横川文彬,鳥畠康充,林寛之,安藤智成,米山猛,渡辺哲陽,佐能唯 臨床整形外科 46巻 8号 755-760頁 2011/08 査読有 原著論文 研究論文(学術雑誌)
- New Method of Motion Analysis to Clarify Differentiation between Lumbar Spinal Canal Stenosis and Osteoarthritis of the Hip Joint Yasumitsu Toribatake, Noriaki Yokogawa, Hiroyuki Hayashi, Takeshi Yoneyama, Tetsuyou Watanabe, Yui Sano Jounral of Spine Research 2巻 2号 220-222頁 2011/02 査読有 原著論文 研究論文(学術雑誌)
- Effect of Torque-Velocity Relationship on Manipulability for Robot Manipulators The ASME Journal of Mechanisms and Robotics 3巻 4号 2011/09 査読有 原著論文 研究論文(学術雑誌)
- Study on Design of Micro-stirrer for Thrombus Dissolution Zhongwei Jiang, Minoru Morita, Tetsuyou Watanabe, Naoki Chijimatsu, Shoichi Kato, Michiyasu Suzuki Microsystem Technologies 14巻 1号 158-165頁 2008/01 査読有 原著論文 研究論文(学術雑誌)
- Grasping Optimization using a Required External Force Set Tetsuyou Watanabe and Tsuneo Yoshikawa IEEE Transactions on Automation Science and Engineering 4巻 1号 52-66頁 2007/01 査読有 原著論文 研究論文(学術雑誌)
- Study on In-vivo Measurement of Solubility for Cerebral Thrombus Dissolution Zhongwei Jiang, Minoru Morita, Tetsuyou Watanabe, Shoichi Kato, Michiyasu Suzuki International Journal of Applied Electromagnetics and Mechanics 24巻 225-234頁 2006/01 査読有 原著論文 研究論文(学術雑誌)
- 非ホロノミックな拘束を持つ3自由度マニピュレータの目標軌道の生成と収束制御 吉川 恒夫,小林 啓吾,渡辺 哲陽 日本ロボット学会誌 18巻 4号 584-589頁 2000/05 査読有 原著論文 研究論文(学術雑誌)
- 複数対象物に対するパワーグラスプの最適化(機械力学,計測,自動制御) 吉川 恒夫,渡辺 哲陽,大東 睦夫 日本機械学會論文集. C編 68巻 668号 1223-1230頁 2002/04 査読有 原著論文 研究論文(学術雑誌)
- 要求外力集合を用いた把持の最適化 渡辺 哲陽,吉川 恒夫 日本ロボット学会誌 21巻 3号 97-102頁 2003/04 査読有 原著論文 研究論文(学術雑誌)
- 要求加速度・平衡力集合を用いた物体の把持の最適化 渡辺 哲陽,吉川 恒夫 日本ロボット学会誌 = Journal of Robotics Society of Japan 22巻 3号 370-376頁 2004/04 査読有 原著論文 研究論文(学術雑誌)
- 能動受動混合拘束の力学 渡辺 哲陽,原田 研介,江 鐘偉,吉川 恒夫 日本ロボット学会誌 = Journal of Robotics Society of Japan 24巻 1号 131-139頁 2006/01 査読有 原著論文 研究論文(学術雑誌)
- 点字読み取り触覚センサ機構 : センサ構造と設計パラメータ アラブシャヒ サイエド アリレザ,江 鐘偉,渡辺 哲陽 日本AEM学会誌 14巻 3号 333-338頁 2006/09 査読有 原著論文 研究論文(学術雑誌)
- 能動受動混合拘束下での物体操作 渡辺 哲陽,原田 研介,江 鐘偉,吉川 恒夫 日本ロボット学会誌 25巻 4号 643-650頁 2007/04 査読有 原著論文 研究論文(学術雑誌)
- 振動を用いた凝着力緩和とその微細操作への応用(機械力学,計測,自動制御) 渡辺 哲陽,岩崎 誠,松村 英和,江 鐘偉 日本機械学會論文集. C編 74巻 737号 23-30頁 2008/01 査読有 原著論文 研究論文(学術雑誌)
- センサ機能を有する血栓溶解用マイクロ撹拌器の開発に関する基礎研究(機械力学,計測,自動制御) 森田 実,江 鐘偉,渡辺 哲陽,鈴木 倫保,加藤 祥一 日本機械学會論文集. C編 74巻 743号 1798-1803頁 2008/07 査読有 原著論文 研究論文(学術雑誌)
- 画像による凝着状態推定とその自動微細操作への応用(機械力学,計測,自動制御) 渡辺 哲陽,芹田 泰 日本機械学會論文集. C編 74巻 747号 2755-2762頁 2008/11 査読有 原著論文 研究論文(学術雑誌)
- 関節トルク・速度対に基づくロボットマニピュレータのための可操作性(機械力学,計測,自動制御) 渡辺 哲陽 日本機械学會論文集. C編 74巻 748号 3012-3018頁 2008/12 査読有 原著論文 研究論文(学術雑誌)
- 把持システムのための関節トルク・速度対ベースド可操作性 渡辺 哲陽 日本ロボット学会誌 27巻 3号 358-367頁 2009/04 査読有 原著論文 研究論文(学術雑誌)
- 圧電振動子による凝着状態の推定と緩和に関する研究(機械力学,計測,自動制御) 渡辺 哲陽,岩崎 誠,松村 英和,江 鐘偉 日本機械学會論文集. C編 75巻 752号 964-969頁 2009/04 査読有 原著論文 研究論文(学術雑誌)
- 腰椎神経根症による間欠跛行患者の歩行特性 : 工学系モーション解析法による評価 林 寛之,鳥畠 康充,横川 文彬,米山 猛,渡辺 哲陽,佐能 唯 Journal of spine research 1巻 7号 1290-1294頁 2010/07 査読有 原著論文 研究論文(学術雑誌)
- 作動範囲に基づく把持システム可操作性指標 渡辺 哲陽 日本ロボット学会誌 28巻 8号 923-929頁 2010/10 査読有 原著論文 研究論文(学術雑誌)
- 間欠跛行の病因診断への歩行動画解析の適用(機械力学,計測,自動制御) 渡辺 哲陽,佐能 唯,米山 猛,鳥畠 康充,林 寛之,横川 文彬 日本機械学會論文集. C編 76巻 772号 3446-3452頁 2010/12 査読有 原著論文 研究論文(学術雑誌)
- 変形性股関節症と腰部脊柱管狭窄における歩行動作の比較 佐能 唯,渡辺 哲陽,米山 猛 生体医工学 49巻 1号 34-39頁 2011/02 査読有 原著論文 研究論文(学術雑誌)
- Special issue on Industrial Robot Technology–Selected Papers from WRS 2018 Advanced Robotics 34巻 7-8号 407頁 2020 査読無 研究論文(その他学術会議資料等)
- Robust bin-picking system using tactile sensor Advanced Robotics 34巻 7-8号 1頁 2020/04 原著論文 研究論文(学術雑誌)
- Variable-Grasping-Mode Gripper With Different Finger Structures For Grasping Small-Sized Items IEEE Robotics and Automation Letters 2021/07 研究論文(学術雑誌)
- Effects of task type and aging on translational body movements while walking under multiple task conditions Yui Murakami,Miho Shogenji,Tetsuyou Watanabe Journal of Nursing Science and Engineering 8巻 1頁 2020/10 査読有 原著論文 研究論文(学術雑誌)
- Robots assembling machines: learning from the World Robot Summit 2018 Assembly Challenge Advanced Robotics 34巻 7-8号 1頁 2020/04 原著論文 研究論文(学術雑誌)
- Development of assembly system with quick and low-cost installation Advanced Robotics 34巻 7-8号 1頁 2020/04 原著論文 研究論文(学術雑誌)
- 多重課題条件下の歩行中において課題の種類と加齢が腰からみた肩回転運動に与える影響 村上唯,生源寺美穂,渡辺哲陽 看護理工学会誌 8巻 230頁 2021/08 査読有 研究論文(学術雑誌)
- Integrating force and vision feedback for flexible assembly system Advanced Robotics 37巻 17号 1100頁 2023/08/24 研究論文(学術雑誌)
- 強制変位下での接触面積の変化に着目した剛性の異なる軟体指の把持耐力への影響の比較 本間 勇輝,藤平 祥孝,花島 直彦,水上 雅人,渡辺 哲陽 日本ロボット学会誌 39巻 8号 771頁 2021/10 査読有 研究論文(学術雑誌)
- Optimizing Motion Parameters in Soft Robotic Hands Using Bayesian Optimization: Enhancing Cycle Time, Addressing Vibration, and Repeatability IEEE Access 2024 研究論文(学術雑誌)
- Single-Fingered Reconfigurable Robotic Gripper With a Folding Mechanism for Narrow Working Spaces IEEE Robotics and Automation Letters 7巻 4号 10192頁 2022/10 研究論文(学術雑誌)
- Effect of button layout on the exploration and learning of robot operation using an unfamiliar controller PLOS ONE 2022/09/02 研究論文(学術雑誌)
- Fatigue Effect on Minimal Toe Clearance and Toe Activity during Walking. Sensors (Basel, Switzerland) 22巻 23号 2022/11/29 研究論文(学術雑誌)
- High-payload and self-adaptive robotic hand with 1-degree-of-freedom translation/rotation switching mechanism IEEE Robotics and Automation Letters 2023 研究論文(学術雑誌)
- Flexible and slim device switching air blowing and suction by a single airflow control IEEE Robotics and Automation Letters 2023 原著論文 研究論文(学術雑誌)
- Grasping Strategy for Unknown Objects Based on Real-Time Grasp-Stability Evaluation Using Proximity Sensing IEEE Robotics and Automation Letters 7巻 4号 8643頁 2022/10 研究論文(学術雑誌)
- Lightweight High-Speed and High-Force Gripper for Assembly IEEE/ASME Transactions on Mechatronics 1頁 2023 研究論文(学術雑誌)
- Development of a Flexible Thin Wearable Device for Tuning Temperature, Humidity, and Surface Friction on Its Surface Applied Sciences 13巻 14号 8352頁 2023/07/19 研究論文(学術雑誌)
- Hand Grasping Assist Glove Combining Exoskeleton Structure and Pneumatically Driven Actuator 2023 IEEE/SICE International Symposium on System Integration (SII) 2023/01/17 研究論文(プロシーディング)
- Whole Shape Estimation of Transparent Object from Its Contour using Statistical Shape Model 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023/10/01 研究論文(プロシーディング)
- Highly Articulated Tube Mechanism With Variable Stiffness and Shape Restoration Using a Pneumatic Actuator IEEE Robotics and Automation Letters 7巻 2号 3664頁 2022/04 原著論文 研究論文(学術雑誌)
- 1-Degree-of-Freedom Robotic Gripper With Infinite Self-Twist Function IEEE Robotics and Automation Letters 7巻 3号 8447頁 2022/07 研究論文(学術雑誌)
- Soft robotic hand with finger-bending/friction-reduction switching mechanism through 1-degree-of-freedom flow control IEEE Robotics and Automation Letters 7巻 2号 5695頁 2022/04 査読有 研究論文(学術雑誌)
- Local Curvature Estimation and Grasp Stability Prediction Based on Proximity Sensors on a Multi-Fingered Robot Hand Journal of Robotics and Mechatronics 35巻 5号 1340頁 2023/10/20 研究論文(学術雑誌)
- Versatile Robotic System for Assembly Tasks Using Flexible Mechanism 2025 IEEE/SICE International Symposium on System Integration (SII) 1440頁 2025/01/21 研究論文(プロシーディング)
- Tight Clearance Peg-in-Hole Motion Planner Using Gripper with Flexible Joint and Differential Infinity Rotatable Function of Palm 2025 IEEE/SICE International Symposium on System Integration (SII) 949頁 2025/01/21 研究論文(プロシーディング)
- Single-Motor-Driven (4 + 2)-Fingered Robotic Gripper Capable of Expanding the Workable Space in the Extremely Confined Environment IEEE Robotics and Automation Letters 2024/12 研究論文(学術雑誌)
- Fast and precise approximation of Minkowski sum of two rotational ellipsoids with a superellipsoid The Visual Computer 2024/06/17 研究論文(学術雑誌)
- Parameter Tuning Method to Improve Cycle Time of Soft Robotic Hand System Using Bayesian Optimization 2024 IEEE/SICE International Symposium on System Integration (SII) 2024/01/08 研究論文(プロシーディング)
- Motor-Less Robotic Gripper: Driving Mechanism by Robotic Manipulator Movement IEEE Access 2025/02 研究論文(学術雑誌)
- Initial study of verbal and nonverbal communication training through the collaborative operation of a humanoid robot for individuals with autism spectrum disorder Asian Journal of Psychiatry 106巻 104423頁 2025/04 原著論文 研究論文(学術雑誌)
- Design, Fabrication, and Testing of a Chain Mail Jamming-Based Stiffness-Changeable Robotic Supporter IEEE/ASME Transactions on Mechatronics 2025/10 研究論文(学術雑誌)
- Single-Motor Robotic Gripper With Multi-Surface Fingers for Variable Grasping Configurations IEEE Robotics and Automation Letters 2024/05 原著論文 研究論文(学術雑誌)
- Variable Logic Gate Mechanism with an AND ⇄ OR Meta-Switch and its Application for Grippers 2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) 649頁 2024/07/15 研究論文(プロシーディング)
- Garment Shape-Forming Actuator Unit with Variable Stiffness and Friction for Dressing and Undressing Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO) 2024/12 査読有 研究論文(プロシーディング)
- Cloth-Climbing Robot for Body Surface Inspection Without Clothing Removal Using Magnetic Gears 2025 IEEE/SICE International Symposium on System Integration (SII) 2025/01/21 査読有 研究論文(プロシーディング)
- A Stiffness-Changeable Soft Finger Based on Chain Mail Jamming Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2023/05/29 査読有 研究論文(プロシーディング)
- Development of a Gripper for Manipulation of Soft Line-Shaped Object
2024 IEEE/SICE International Symposium on System Integration (SII) 2024/01/08 研究論文(プロシーディング)
- LCLE: A Liquid-Cooled Laminar Electromagnet for a Soft Robotic Gripper and Heavy Object Grasping 2023 IEEE 5th International Conference on BioInspired Processing (BIP) 2023/11/28 査読有 研究論文(プロシーディング)
講演・口頭発表等
その他(報告書など)
- 安心・快適性を創出するRobotic Nimbus 渡辺 哲陽, 多田隈 建二郎 計測と制御 63巻 5号 287-292頁 2024/05 ⑥総説・解説(学術雑誌)
- 汎用性と柔軟性を高めるロボットハンド設計の考え方 渡辺哲陽 機械設計 67巻 13号 19-22頁 2023/12 ⑨総説・解説(商業誌)
- World Robot Summitでの大学チームJAKSの挑戦 辻徳生, 渡辺 哲陽 計測と制御 61巻 7号 504-506頁 2022/07 ⑥総説・解説(学術雑誌)
- ソフトロボットハンドの技術動向と研究事例 渡辺哲陽 機械設計 66巻 5号 28-34頁 2022/04 ⑨総説・解説(商業誌)
- 物体把持・操作のためのロボットハンド 渡辺哲陽 日本ロボット学会誌 40巻 5号 363-368頁 2022/06 ⑥総説・解説(学術雑誌)
- ロボット技術による食材加工の支援に向けて 山崎公俊,渡辺哲陽,原田研介,横小路泰義 日本ロボット学会誌 39巻 2号 132-136頁 2021/10/24 ⑥総説・解説(学術雑誌)
- ロボットマニピュレーションを支えるハードウェア:柔らかさをもつロボットハンド 渡辺哲陽 計測と制御 56巻 10号 736-740頁 2017/10 ⑥総説・解説(学術雑誌)
- Survey of robotic manipulation studies intending practical applications in real environments -object recognition, soft robot hand, challenge program and benchmarking- 31巻 19-20号 1114-1132頁 2017/09/02 ⑥総説・解説(学術雑誌)
- 流体を充填した指先をもつロボットハンドによる壊れ易い物体の把持 渡辺哲陽 北陸経済研究 2015/11 ⑨総説・解説(商業誌)
- yarpによるアプリケーション連携 渡辺 哲陽 日本ロボット学会 30巻 9号 849-852頁 2012/11/01 ⑭その他記事

芸術・フィールドワーク
特許
○攪拌処理装置及びカテーテル(特許番号:2005-085257)
○攪拌処理装置及びカテーテル(特許番号:WO 2006/101170)
○ロボット
○歪センサ及び歪の検知方法
○把持装置、食品取扱装置及び食品製造方法
○3次元印刷方法、力センサの製造方法及び3次元印刷装置
○サポータ
○吸盤
○足裏観察装置および足裏観察方法
○対象物保持法、および、当接機構(公開年月:2015/02/02)(特許番号:特願2013-151087)
○当接機構
○医療用レトラクター
○コントローラ,鍛圧機械,および制御方法
○コントローラ,鍛圧機械,および制御方法
○触覚センサ
○脳腫瘍領域の判別方法
共同研究希望テーマ
科研費
○挑戦的研究(萌芽)「汗・指紋制御に基づく極小把持力把持術の開拓」(2018-2020) 代表者
○挑戦的研究(萌芽)「不均一性・弾性・異方性を伴う紐状柔軟物の操作能力の確立
」(2018-2019) 分担者
○新学術領域研究(研究領域提案型)(継続の研究領域・終了研究領域)「操作嗜好性を制御して高効率操作習熟を実現するロボット操作システム」(2017-2018) 代表者
○基盤研究(B)「破壊予測・防止法に基づく次世代脳神経外科手術サポートシステム」(2016-2018) 代表者
○挑戦的萌芽研究「スキルレベル・行動が類似の表出知提示による能動的「こつ」習得サポート」(2014-2015)
○挑戦的萌芽研究「提示情報制御による不器用さ改善の可能性」(2012-2013) 代表者
○若手研究(B)「操り空間モジュール化に基づく直接接触不可能物体のピンセットマニピュレーション」(2008-) 代表者
○基盤研究(B)「共焦点顕微鏡プローブと摩擦検出微細鉗子を用いた脳腫瘍の術中診断・摘出システム」(2008-) 分担者
○基盤研究(C)「スキーのための雪面特性評価法に関する研究」(2008-) 分担者
○基盤研究(C)「血管内微細振動子による血栓の破砕と低侵襲回収療法の開発」(2006-) 分担者
○萌芽研究(2002-2008)「薬物を内包したリポソームの放出透過特性の解析と計測評価に関する基礎研究」(2006-) 分担者
○萌芽研究(2002-2008)「薬物封入リポソームの放出特性の解析と制御技術に関する基礎研究」(2004-) 分担者
○若手研究(B)「細胞マイクロインジェクション自動化のための穿孔技能解析」(2004-) 代表者
○若手研究(B)「振動による凝着力緩和を利用した自動微小物体マニピュレーションシステムの開発」(2006-) 代表者
○挑戦的研究(萌芽)「熱・水・風を放出制御できるロボットハンドを活用したウェットヒート柔軟物整形」(2021-2023) 代表者
○基盤研究(B)(一般)「界面洗浄・摩擦制御の実現による未知の表面特性をもつ物体の洗浄把持・操り」(2021-2023) 代表者
競争的資金・寄付金等
○競争的資金(学外) (2009-2009) 研究 剛性可変の表面構造を持つロボットハンドの開発 JSTシーズ発掘試験A(発掘型) JSTシーズ発掘試験A(発掘型)
○競争的資金(学外) (2021-2022) 研究 CPS構築のためのセンサリッチ柔軟エンドエフェクタシステム開発と実用化 戦略的イノベーション創造プログラム(SIP)第2期/フィジカル空間デジタルデータ処理基盤/サブテーマⅢ:Society 5.0実現のための社会実装技術 NEDO
○助成金 (2020-2021) 研究 ロボットの協働操作による自閉症者の言語・非言語コミュニケーション訓練 研究助成 財団法人立石科学技術振興財団
○競争的資金(学外) (2019-2020) 研究 NEDO先導研究プログラム/新産業創出新技術先導研究プログラム/食材加工サポートシステムの研究開発 NEDO NEDO
○競争的資金(学外) (2018-2020) 研究 転倒リスク減少のためのウェラブル足底可視化・表示システムの開発 研究助成 三豊科学技術振興協会
○競争的資金(学外) (2016-2018) 研究 破壊予測・防止法に基づく次世代脳神経外科手術サポートシステム 科学研究費補助金 基盤研究(B)(一般) JST
○競争的資金(学外) (2017-2018) 研究 操作嗜好性を制御して高効率操作習熟を実現するロボット操作システム 科学研究費補助金 新学術領域研究(研究領域提案型)(公募研究) JST
○競争的資金(学外) (2015-2016) 研究 次世代ロボット中核技術開発/(革新的ロボット要素技術分野)次世代マニピュレーション/把持機能と認識機能の統合による高度なマニピュレーションの実現 NEDO 次世代ロボット中核技術開発/(革新的ロボット要素技術分野)次世代マニピュレーション 調査研究 NEDO
○助成金 (2015-2016) 研究 破壊・非破壊を自在に実現するロボットハンドシステムの開発 研究助成 財団法人メカトロニクス技術高度化財団
○競争的資金(学外) (2014-2015) 研究 手術用吸引器用アタッチャブル力センサシステムの開発 研究成果展開事業 研究成果最適展開支援プログラム フィージビリティスタディ【FS】ステージ JST
○競争的資金(学外) (2014-2016) 研究 共焦点顕微鏡を用いた脳腫瘍の微細蛍光現象の解明と浸潤領域の判別 科学研究費補助金 基盤研究(A)(一般) JST
○競争的資金(学外) (2014-2015) 研究 スキルレベル・行動が類似の表出知提示による能動的「こつ」習得サポート 科学研究費補助金 挑戦的萌芽研究 JST
○助成金 (2013-2013) 研究 畜光材・ナイロン生地を利用した微細内視鏡用力センサの開発補助事業 公益財団法人JKA若手研究 公益財団法人JKA
○助成金 (2012-2012) 研究 把持力可視化による力覚提示可能な脳外科手術用マニピュレータの開発 中谷電子計測技術振興財団研究助成 中谷電子計測技術振興財団
○助成金 (2012-2012) 研究 振動を活用した振戦抑制ピンセットの開発 中部電気利用基礎研究振興財団研究助成 中部電気利用基礎研究振興財団
○競争的資金(学外) (2012-2013) 研究 提示情報制御による不器用さ改善の可能性 科学研究費補助金挑戦的萌芽研究 JST
○助成金 (2012-2013) 研究 器用さ獲得のための情報制御技術の確立 電気通信普及財団研究調査助成 電気通信普及財団
○助成金 (2010-2011) 研究 ポスチャベースド把持計画法の開発 研究助成 財団法人澁谷学術文化スポーツ振興財団
○助成金 (2010-2012) 研究 剛性可変皮膚構造を持つロボットハンドのためのポスチャベースド把持計画法の開発 マツダ研究助成 財団法人マツダ財団
○助成金 (2010-2011) 研究 物体安定把持・操作性向上のためのロボットハンドの柔らかさ可変制御表面構造の開発 研究助成 財団法人メカトロニクス技術高度化財団
共同研究・受託研究実績
A-STEP採択課題
○手術用吸引器用アタッチャブル力センサシステムの開発 少子高齢化先進国としての持続性確保 ライフイノベーション 機械・ものづくり
学域・学類担当授業科目
○創造デザイン実習(2017)
○バイオロボティクス(2017)
○情報処理演習(H27年度以前入学者用)(2017)
○創造デザイン実習(2017)
○機械工学輪講(2016)
○情報処理演習(H27年度以前入学者用)(2016)
○卒業研究(2016)
○創造デザイン実習(2016)
○機械工学実験Ⅰ(2016)
○機械工学実験Ⅱ(2016)
○創造デザイン実習(2016)
○卒業研究(2016)
○バイオロボティクス(2016)
○バイオロボティクス(2015)
○機械解析入門(2015)
○創造デザイン実習(2015)
○創造デザイン実習(2015)
○認知科学概論(2014)
○創造デザイン実習(2014)
○バイオロボティクス(2014)
○機械解析入門(2014)
○創造デザイン実習(2014)
大学院担当授業科目
○知的情報機械システム論(2017)
○知的情報機械システム論(2017)
○知的情報機械システム論(2017)
○実践・計測制御B(2017)
○Measurement and controlA(2017)
○実践・計測制御A(2017)
○Measurement and controlB(2017)
○情報強化された環境調和型メカトロニクスB(2017)
○情報強化された環境調和型メカトロニクスA(2017)
○知的情報機械システム論(2017)
○知的情報機械システム論(2016)
○実践・計測制御A(2016)
○情報強化された環境調和型メカトロニクスA(2016)
○実践・計測制御B(2016)
○情報強化された環境調和型メカトロニクスB(2016)
○Measurement and control(2015)
○機械科学特別講義Ⅰ環境・人間機械コース(2015)
○環境・人間機械科学演習(2015)
○情報強化された環境調和型メカトロニクス(2015)
○知的情報機械システム論(2015)
○実践・計測制御(2015)
○知的情報機械システム論(2014)
○ロボットハンドリング工学(2014)
○ロボットマニピュレーション工学(2014)
○知的情報機械システム論(2014)
○情報強化された環境調和型メカトロニクス(2014)
○実践・計測制御(2014)
他大学の客員教授
教育活動(FD)に関する研究
国際事業協力
留学生参加の社会活動
審議会等の参加
○日本機械学会ロボティクスメカトロニクス講演会2020 実行委員長(2019/01-)
○看護理工学会編集委員会委員(2022/07/01-2023/06/30)
○看護理工学会評議員(2020/04/10-2023/03/31)
○計測自動制御学会SI部門講演会 表彰委員長(2021/07/21-2022/02/28)
○看護理工学会広報委員会委員(2020/03/06-2021/03/31)
○SICE 北陸支部顧問(2020/01/15-2022/01/14)
○SICE 北陸支部副支部長(2018/01/15-2019/01/14)
○SICE 北陸支部支部長(2019/01/15-2020/01/14)
○SICE SI部門マニピュレーション部会主査(2018/01/01-2019/12/31)